86Duino モーションエディター
86Duinoモーションエディター(86ME)は、86Duinoボードを使用してロボットのアクションを編集できるため、ロボットのアクションの編集プロセスが迅速になり、ロボットがアクションを編集するための86Duinoプログラムを自動的に生成できます。 86MEコンセプトビデオ:
インストールチュートリアル
現在、86MEはWindows XP / Vista / 7/8/10をサポートしており、MicroSoft .NETフレームワーク4.5を環境にインストールする必要があります。 86MEをダウンロードして解凍すると、86MEフォルダが表示され、その中のファイルは86ME実行可能ファイルと必要なライブラリおよび関連する手順を含む下図に示されており、サポートされている環境で86ME.exeを直接実行して86MEでの作業を開始できます。
事前準備
- 86Duinoと86MEの間のギャップを埋める : 86MEはFirmataライブラリを介して86Duinoに命令を転送するため、86MEを使用する前に、86Duino Coding 210のサンプルドラフト(File->Examples->Servo86->MotionEditor)を86Duinoに書き込む必要があります。その後、両者間のコミュニケーションの架け橋を確立した後、86MEの作業を開始できます。
- 接続方法と説明 : 現在、86MEはCOMポートを使用して86Duinoに接続し、アクション信号を送信するためのコンピューターをサポートしており、86MEはユーザーが最初に86Duinoとコンピューター間のインターフェースを選択できるようにし、自動、オフライン、および接続を初期化するために選択される3つのモードに分かれています。 86ME.exeを実行する前に、これらのパターンを理解する必要があります。 図の「-auto-」オプションは、追加する最後のCOMポートを開きます。「COM4」は、86MEが現在コンピューターに存在するCOMポートを検出し、「-offline-」オプションはオフラインモードを示し、86Duinoと通信しないことを示します。
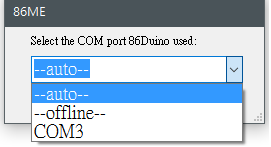
したがって、オフラインモードはファイル編集と86Duinoプログラム生成のみをサポートし、リアルタイムのモーター制御はサポートしていません。 モーターを直接制御してアクションを編集するには、86DuinoのUSBデバイスをコンピューターのUSBに接続し、86Duinoに接続されているCOMポート(自動または既知のCOMポートを使用できます)を選択してからプログラムを使用します。 86Duinoがどのポートに接続されているかを確認したい場合は、以下の例に示すように、86Duinoに接続されているCOMポートをデバイスアドミニストレータで探してみてください。これは、86Duinoとコンピュータ間のCOM4接続を確認することができます。 86Duinoに接続せずに自動モードを選択すると、プログラムは実行中にオフラインモードに戻ります。 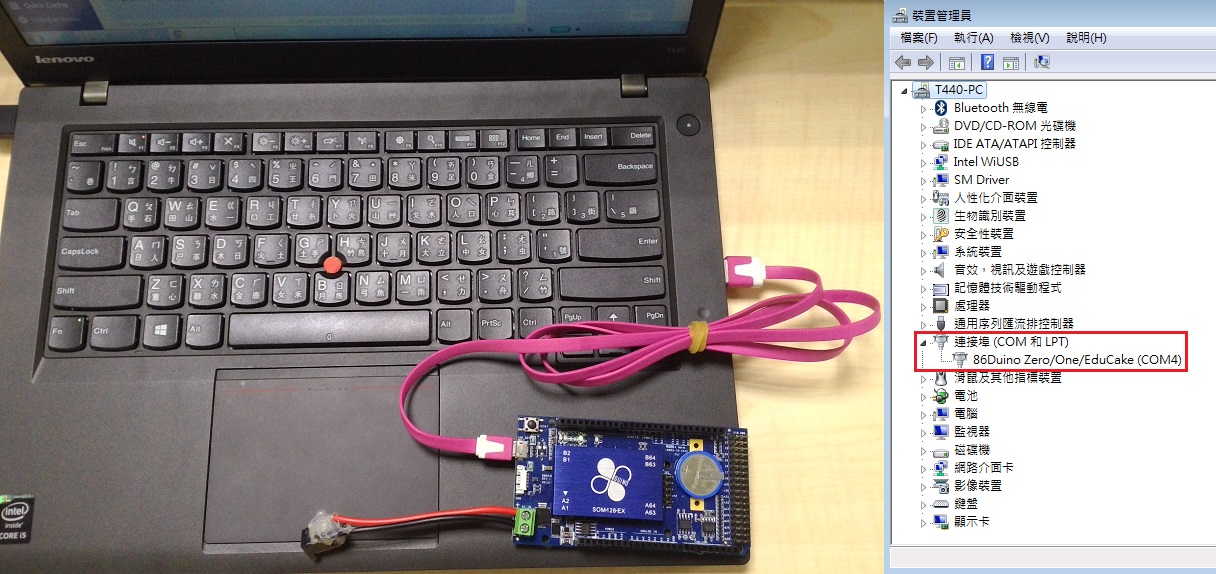 一般的に言えば、オフラインモードは、ロボットの動きにすでに精通しているユーザーに適しているため、これらのユーザーは既存のファイルを簡単に編集して調整を行うことができます。 自動モードにより、86MEを簡単に使い始めることができますが、多くの86Duinosまたは多くの異なるCOMポートを備えたコンピューターを使用している場合は、混乱を避けるために選択したモードを使用することをお勧めします。 次に、COMポートを設定したら、スタートボタンを押して86MEのメインウィンドウに入るか、終了ボタンを押して86MEを離れることができます。
一般的に言えば、オフラインモードは、ロボットの動きにすでに精通しているユーザーに適しているため、これらのユーザーは既存のファイルを簡単に編集して調整を行うことができます。 自動モードにより、86MEを簡単に使い始めることができますが、多くの86Duinosまたは多くの異なるCOMポートを備えたコンピューターを使用している場合は、混乱を避けるために選択したモードを使用することをお勧めします。 次に、COMポートを設定したら、スタートボタンを押して86MEのメインウィンドウに入るか、終了ボタンを押して86MEを離れることができます。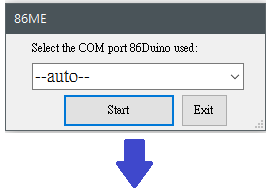
機能の説明
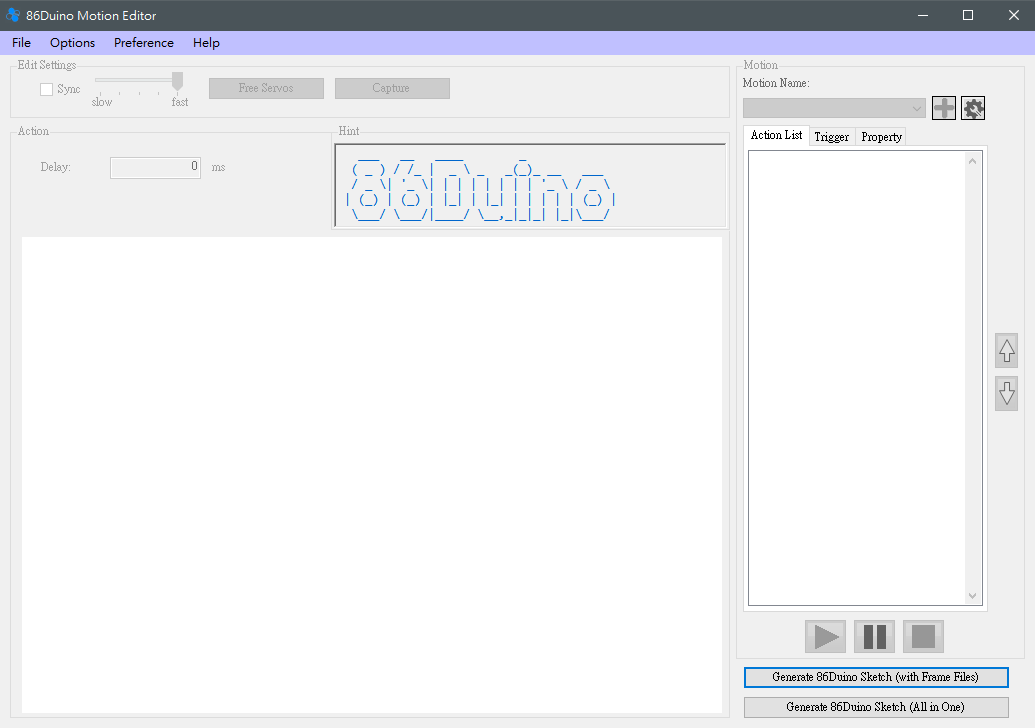
ここでは、最初にプログラムインターフェイスをいくつかのブロックに分割して説明します。
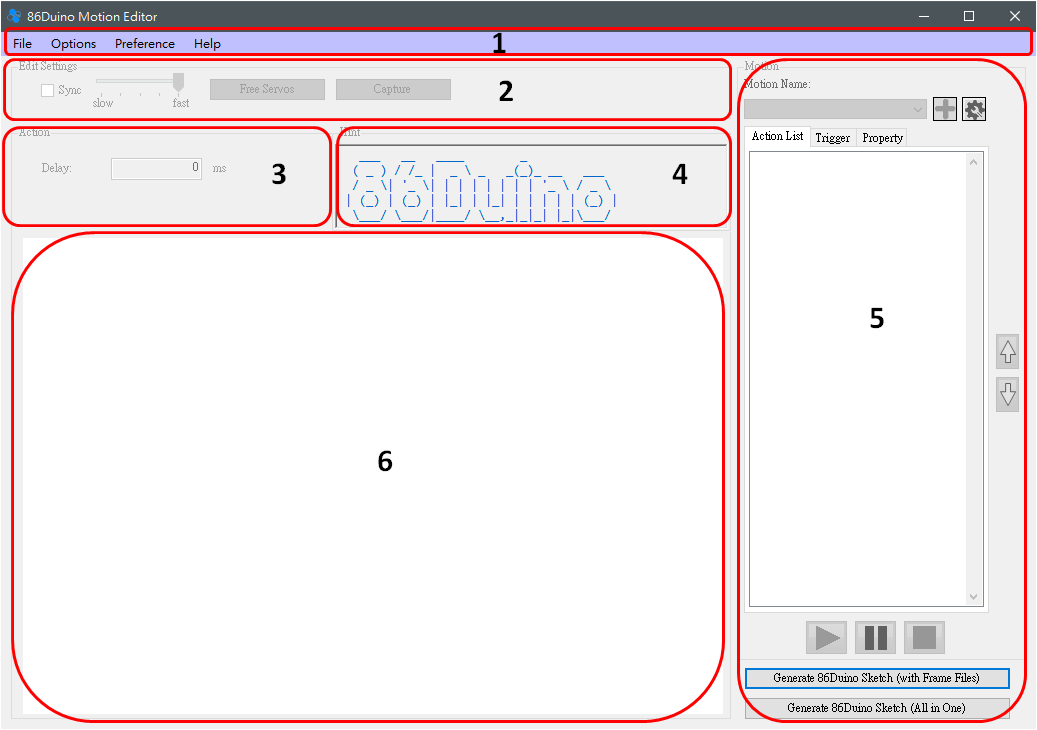
- このセクションには 3 つのドロップダウン メニューがありますファイル、オプション、ヘルプで、拡張されたオプションは次のとおりです

- [ファイル] メニューには、新しいプロジェクト、プロジェクトの読み取り、プロジェクトの保存、およびプログラムの終了があり、目の肥えた読者は、最初は多くのボタンが淡色表示されていることに気付くかもしれません。アクションを編集したり、アクションをテストしたりする場合は、File->New Project を使用してプロジェクトを作成するか、File>-Open Project を使用して以前に保存したプロジェクトを読み取る必要があります。 File->Save Project は現在編集されているプロジェクトを保存し、File-> Exit はプログラムを終了します。
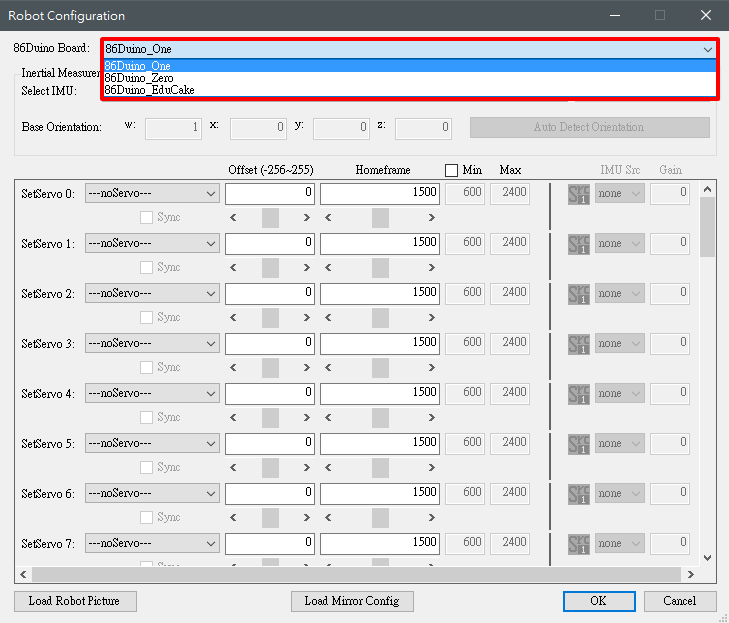
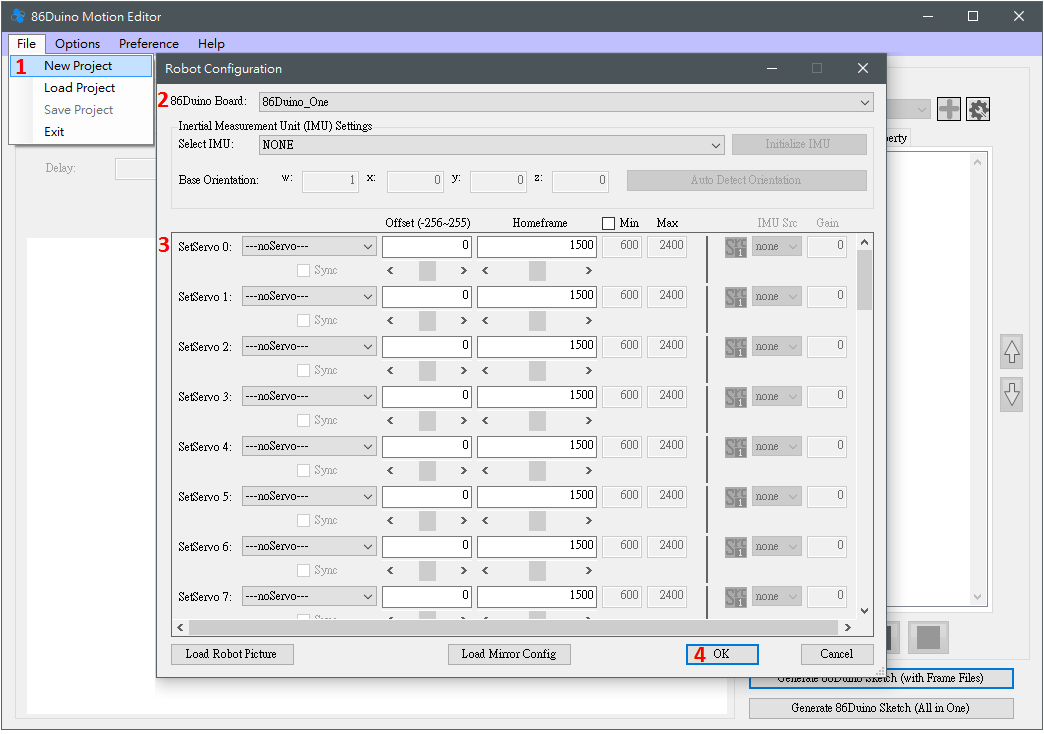
では、新しいプロジェクトを追加するにはどうすればよいでしょうか。 [File] >- [New Project] (新規プロジェクト) をクリックすると、[Robot Configuration] ウィンドウが表示され、ロボット関連の 4 つの設定を行うことができます。
(1) 86Duino ボード: ロボットが使用する 86Duino モデルを選択するために使用され、現在、ユーザーが選択できる 86Duino One/Zero/EduCake があり、86Duino のモデルが異なると、ユーザーが設定できる SetServo の数が異なり、例えば、86Duino One にはモーターを制御できる 45 本のピンがあり、その後 SetServo 0~44 が表示され、86Duino Zero が表示されます SetServo 0~13 と 42~44 のみが表示されます。
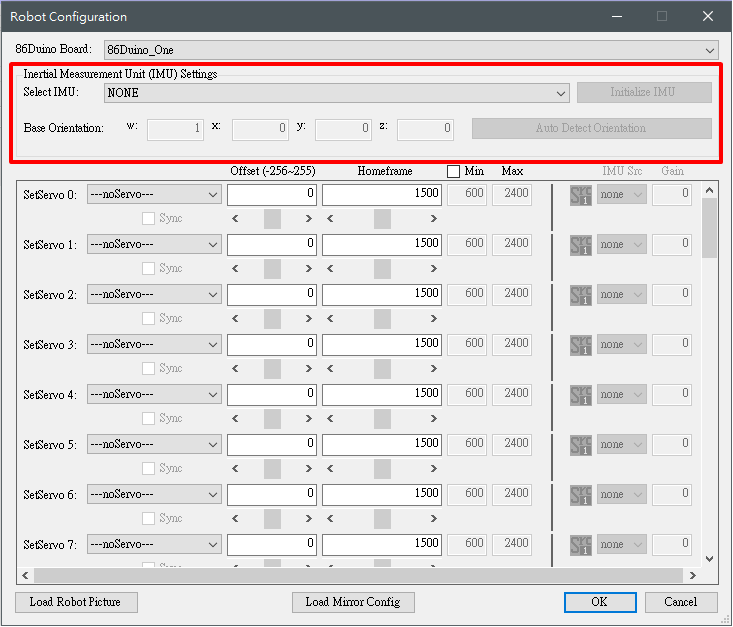
(2)IMU設定 : ロボットが使用する慣性計測ユニット(IMU)を設定し、現在サポートされているIMUモデルは86個の組み込みIMUとDuinoOneのRM-G146です。 IMUモデルを選択し、接続モードになっている場合、86Duinoに接続されているIMUは「Initialize IMU」ボタンで初期化でき、現在のIMUのBase Orientationは「Auto Detect Orientation」で検出できます。 これらの設定が完了すると、IMU補正機能を正しく使用して、ロボットのバランスを容易にすることができます。 補償功能,以利於機器人的平衡。
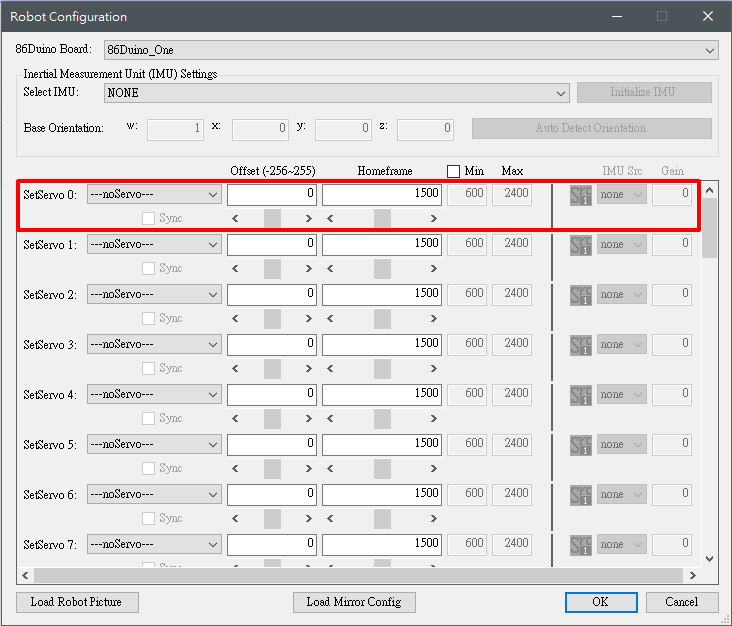
(3) SetServo : 86Duinoに接続されたモーターの設定に使用され、モーターがサポートするモーターモデル、オフセット(オフセット)、開始位置(ホームフレーム)、最大値(最大)、最小値(最小)がユーザーに設定できるように提供され、現在サポートされているモーターモデルは次のとおりです。
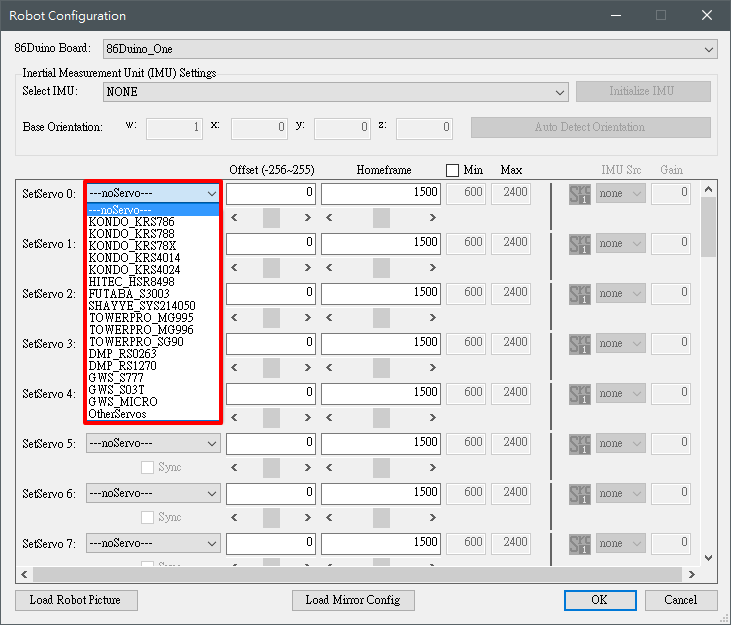
モーターを選択した後、下図のスクロール制御オプションを使用してオフセットと開始位置を調整でき、同期制御項目を確認した後、モーターの開始位置のオフセットと角度を同期して、即座に調整できます。 モーターの許容値範囲は、モーターが選択されると自動的に変更されるため、手動で変更する場合は、最初に右上隅にある最小最大制御を確認する必要があります。 IMUを設定した場合は、IMU Srcを設定してIMU補償機能をオンにし、補償ソースを選択し、ゲインフィールドを通じて補償係数を設定できます。2番目の補償ソースを追加する場合は、Src 1アイコンを押してSrc 2に切り替え、2番目の補償ソースのセットを設定できます。
(4)ロボット画像のロード : ロボットの各部分に対するモーターの対応する位置を容易にするために、ユーザーはロボットの代表的な画像として画像を選択でき、フレームの編集時にサーボと画像の対応する位置を選択できるため、ユーザーはサーバーと実際のロボットとの間の対応を識別できます。
(5)ミラー構成のロード : この機能は、アクションの左半分を編集するときに、ヒューマノイドロボットなどの対称ロボットの編集を容易にするために使用されるユーザー定義のミラー構成を読み取ることができます、この機能を使用して体の左半分を体の右半分にコピーし、アクション編集のプロセスをスピードアップできます。 イメージ構成には、サーバー間の 1 対 1 の対応を示す拡張子 cfg のファイルがあり、各行には「-」記号で区切られた一連の対応が書かれています。これは、ピン 1 と 2 のサーバーが対称エッジ、1 が左、2 が右であることを意味します。
- [オプション] メニューには [ロボット構成] オプションがあり、File->New Project と同様に、現在のロボット関連の設定を編集できます。
- [設定] メニューは、ユーザーが選択可能なインターフェイスを提供する言語であり、現在、英語、繁体字中国語、簡体字中国語、および日本語をサポートしています。
- ヘルプメニューには「チュートリアル」と「バージョン情報」のオプションがあり、「チュートリアル」をクリックすると86MEのドキュメントが掲載された86DuinoのWebサイトに移動し、「バージョン情報」をクリックすると、著者情報や86Duinoの公式ファンページなどの86ME関連情報が表示されます
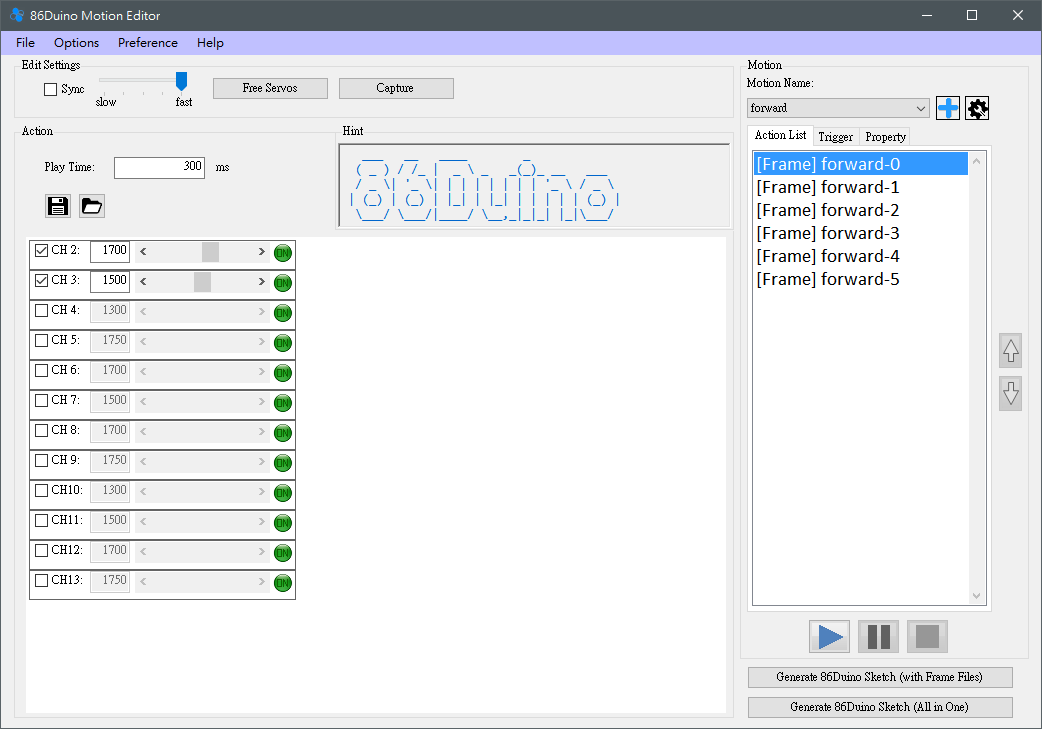
2.Edit Settings このブロックには以下の機能があります

(1) 同期機能により、ユーザーは現在選択されているフレームを同期してロボットにリアルタイムで反映するかどうかを決定できます。
(2) ここでのプーラーは、同期時のモーターの回転速度を決定でき、これは5つのレベルに分かれており、右が最も速く、左が最も遅いです。
(3) モーターを放して、モーターが出力しないようにします。
(4) キャプチャは、現在のモーターの角度を読み取るために使用され、現在サポートされているモーターは近藤、ハイテック、双葉の3シリーズですが、キャプチャ機能はすべてのモーターを最初に解放するため、ロボットがサポートされていない場合、ロボットが落下する可能性がありますので、使用するときは特に注意してください。
3. Action ブロックは、
(1) このアクションに移動する時間をミリ秒単位で設定します。
(2) 選択したアクションがフレームの場合、86Duinoフレームファイルを保存/読み取るための2つのボタンがアクションブロックに表示されます。 save機能は、現在選択されているフレームのサーバー角度をテキストファイルに保存することができ、read機能は、保存されたフレームファイルの値を現在のフレームに読み込むことができます。
4. ヒントブロックは、このブロックでは、アクションのリストを追加する方法、アクションを実行する際の注意事項など、ユーザーにいくつかのヒントを提供します。すでに86MEに精通している場合は、自分のアイデアに従ってプログラムを作成でき、ヒントは基本的に86MEを使い始めたばかりのユーザーが次のステップを提供するものです。
5. モーションブロックは、ロボットの動きを編集およびテストするために使用されます。 各アクションは「モーション名」で区切られ、例えば、ユーザーは歩く、パンチする、しゃがむなどのアクションを追加でき、「+」ボタンを押すと、以下に示すように、ユーザーが「モーション名」を決定するためのウィンドウがポップアップ表示されます。
「OK」を押してアクションを追加します。 別のアクションを追加する場合は、「+」を押して同じプロセスを繰り返すか、すでに存在する別のアクションを編集する場合は、「モーション名」フィールドのスクロールを使用して選択できます。 右端の歯車タイプのボタンは、モーションを管理するための次のような多くの機能を提供します。コピー、名前変更、削除、インポート、エクスポート。

アクションリスト:
モーションを作成したら、アクションリストの編集を開始できます。たとえば、アクションをレンダリングするために4つのフレームが必要な場合は、アクションリストを右クリックしてアクションを追加できます。
Action Listの主な作品は、以下の通りです。
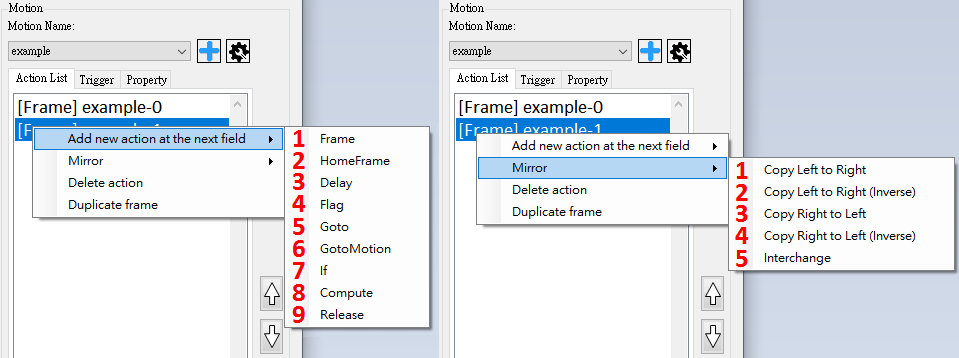
(1)アクションを追加し、全9種類のアクション
(2)選択したフレーム上でミラー作業(上図と右図の計5種類の作業)を行い、イメージコピー(左から右、右から左、イメージファイルで左と右の関係が定義)、リバース値(サーバホーム値に対して相対的)、左右スワップによるミラーコピーを含む。
(3)選択したアクションを削除する
(4)次のグリッドにFrameまたはHomeFrameをコピーできます
アクションは、下の2つのボタンを使用して上下に移動できます。
![]()
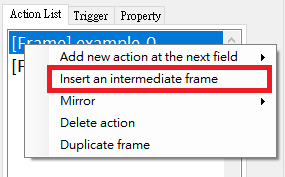
アクションリストには便利な機能もあり、フレームの背面がフレームの直後に続くと、フレームを挿入する機能がオンになり、各モーターの角度は、モーターに対応する2つのフレームを2で割る前後の2つのフレームを追加した結果であり、この機能は、大きな距離を移動する2つのフレーム間のアクションを編集するのに便利です。 アクションパラメータの調整については、ブロック6で使用例とともに説明します。
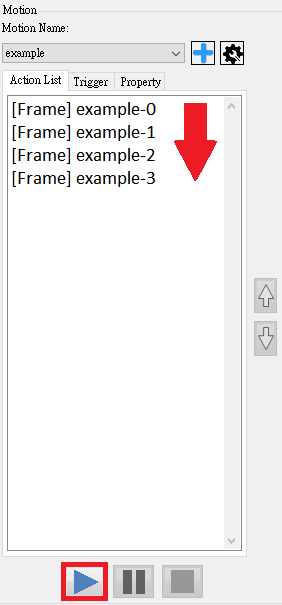
アクションバーを編集した後、86Duinoに接続している場合は、再生ボタンを押してアクションリストの最初のアクションから最後のアクションまでのアクションをテストでき、ユーザーはこの機能を使用してアクションをテストできます。
トリガー:
下の2つのボタンは、現在のプロジェクトが86Duinoに焼き込むことができるinoプログラムファイルとして出力され、Generate 86Duino Sketch (with Frame Files)はinoファイルといくつかのアクション設定ファイルを生成し、Generate 86Duino Sketch (All in One)はすべての設定をinoプログラムに書き込みます。 このファイルは、現在編集されているすべてのアクションに加えて、各アクションのトリガーとプロパティに従って生成され、トリガーの設定はモーションを選択して[トリガー]タブに移動して設定することであり、現在サポートされているトリガー方法は、自動、キーボード、Bluetooth、ps2コントローラー、加速度計の5つです。
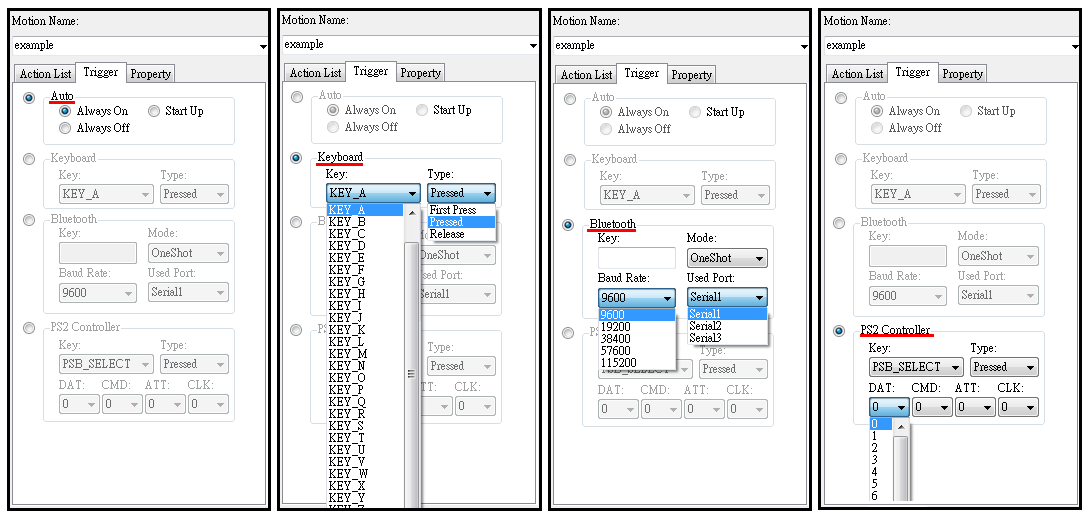
(1) 自動ボトム分割常にオン、常にオフとスタートアップ、常にオン表示此動作要永遠展現,常にオフ則表示永遠不展現此動作,スタートアップ是會在86Duino啟動時展現一次。
(2) キーボードはキーとタイプで構成でき、キーは現在A~Zと上下、左右、ブランク、ESCを選択して選択でき、タイプはファーストプレス、プレス、リリースを提供し、キーと対応の場合にモーションがトリガーされます。 例えば、ロボットの歩行をキーAに設定して押すると、ロボットは立った状態に戻り、キーAと離すと、Aボタンを押すとロボットは歩き続けることができ、Aボタンを離すと立った状態に戻ります。
(3) Bluetoothは、1文字のキー入力だけでなく、モードモジュールとBluetoothモジュールが配置されているボーレートとシリアルポートを選択できます。 例えば、86DuinoのSerial1にBluetoothモジュールをインストールし、MotionのキーをBに設定し、プログラムを生成して書き込み、携帯電話のAPPソフトウェア(現在は1文字のAPPの送信のみ対応)を使用して信号を送信し、ロボットが前進するように制御します。 モードオプションはOneShotとContinuousに分かれており、OneShotモードでは、ロボットがパンチ、キック、その他のアクションに使用できるアクションが一度だけ信号がトリガーされますが、Continuousは常にアクションをトリガーし、前進、後退、その他のアクションに使用できます。
(4) PS2コントローラーは、PS2コントローラーのボタンをキーとして選択し、キーボードと同じようにボタンをトリガーするタイプを設定できます。 また、PS2のコントローラーでロボットを制御する場合は、PS2と86Duinoを接続する4つのピンも設定する必要があります。これは、DATE(データ)、CMD(コマンド)、ATT(アテンション)、CK(クロック)の4つのピンに対応する86Duinoのピンです。
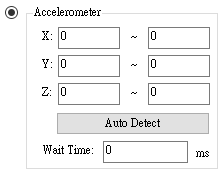
(5)加速度計は、加速度計のX軸、Y軸、Z軸の読み取り値を開始条件として選択できますが、3つの軸の範囲が設定され、読み取りが続く時間があります。 「自動検出」ボタンは、IMUがロボット構成で正しく初期化されている場合で、現在の加速度計の読み取り値を自動的に検出し、空白を埋める範囲を自動的に選択できます。
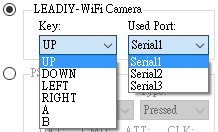
(6) WiFiカメラ(WiFi602)これは、5V、GND、TX、およびRXピンを備えたビデオストリーミングモジュールであり、電源を入れるとWiFi APがセットアップされるため、携帯電話はこのWiFiに接続してオンにすることができますアプリストリームを取得できます。 さらに、APPのボタンステータスはシリアルポートを介して送信することもできるため、シリアルポートを選択する必要があり、現在サポートされているキーは、次の図に示すように、上、下、左、右、A、Bです。

(7)アナログは、下の図に示すように、アナログ信号を介してアクションをトリガーすることができ、ピンはアナログソースピンを設定するために使用され、中央のコンボボックスは、=、≠、≧、≦、>、<、および値を含む判断条件を選択するために使用され、値は値を選択するために使用され、条件が確立されるとアクションがトリガーされます。
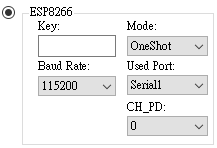
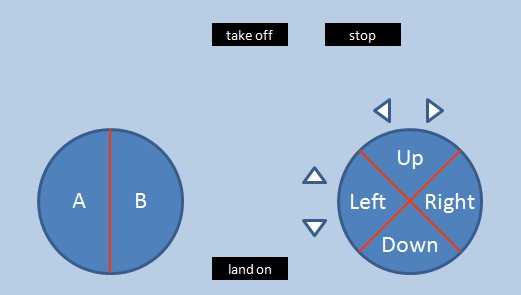
(8) 現在、ESP8266トリガーがこれをサポートしていますアプリまず、ESP8266を86Duinoに接続してAP基地局モードに設定し、次に86MEで対応するボーレートを設定し、接続されたシリアルポートとESP8266 CH_PDピンを86DuinoのどのPINに接続し、次にキーをAPPの画像に対応するように設定すれば完了です、APPのボタンは下の図に示されており、そのキー値は「$PM」を追加する前の画像番号です。 たとえば、左ボタンのキーは「$PM 00」です。

最後に、結果のプログラムをコンパイルする前に、コーディングIDEのライブラリのインポート機能を使用して、ESP8266ライブラリをインポートする必要があります。 コンパイルが成功すると、ESP8266、86Duino、APP間の接続が完了します。
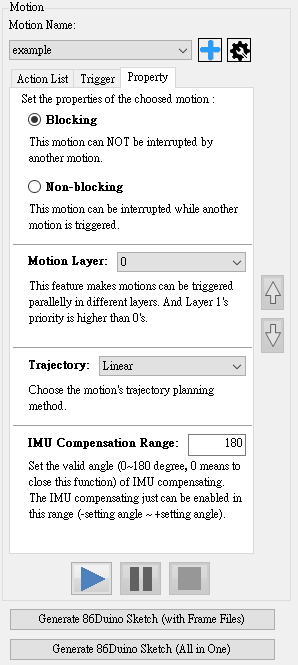
プロパティの設定は現在、次のように分類されています。
(1)ブロッキングとノンブロッキング:ブロッキングの動作は、生成されたプログラム内の他の動作によって中断されませんが、ノンブロッキングの動作は、他の動作のトリガによって中断されます。
(2)モーションレイヤー:アクションのレベルを設定し、この機能は、ヒューマノイドロボットが動いているときなど、異なるレベルのアクションを同時にトリガーできるようにすることです。 ただし、両方のレベルのアクションに同じサーバーを使用する場合、優先度の問題があり、この場合、レベル 1 のアクションがレベル 0 のアクションよりも優先されます。 したがって、アクションをMotion Layer 1に設定した場合、ユーザーは下図に示すように、Frameプロパティで使用するサーバーを確認する必要があります。これにより、レベル0とレベル1のアクションが同時にトリガーされた場合、選択したサーバーCH2とCH3がレベル1で編集されたアクションを優先します。
(3)軌道 : 動きの軌道を設定する方法は、現在、線形、制約付き立方体、ナチュラルキュービック、Catmull-Romスプラインの4つの方法をサポートしており、3つのキュービック計画方法は、リニアと比較して運動中に発生する振動を減らすことができ、ナチュラルキュービックの効果が最も重要ですが、ナチュラルキュービックです Catmull-Rom Spline と Constrained Cubic の計画方法はこの問題を回避できますが、その中で Constrained Cubic はオーバーシュートを最もよく抑制できますが、振動を減らす効果は Natural Cubic ほど驚くべきものではありません。 現在、3つのキュービックプランニングメソッドは、すべてのフレームアクションのみをサポートしており、つまり、フレーム以外のアクションを含めることはできません、他のアクションが自動的に線形に縮退する場合は、それらの使用にもっと注意を払ってください。
(4) IMU補正範囲:IMU補正機能の有効角度を設定します(0~180度、0は補償機能をオフにすることを意味します)、(-set ~+設定値)の角度内でのみ、IMUは補償値を生成します、この機能は補償の有効範囲を設定でき、一部のアクションが補償機能を必要としない場合は、0に設定して補正をオフにすることもできます。
結果として得られるプログラムには 2 つのタイプがあり、わずかに異なる方法で書き込まれます。
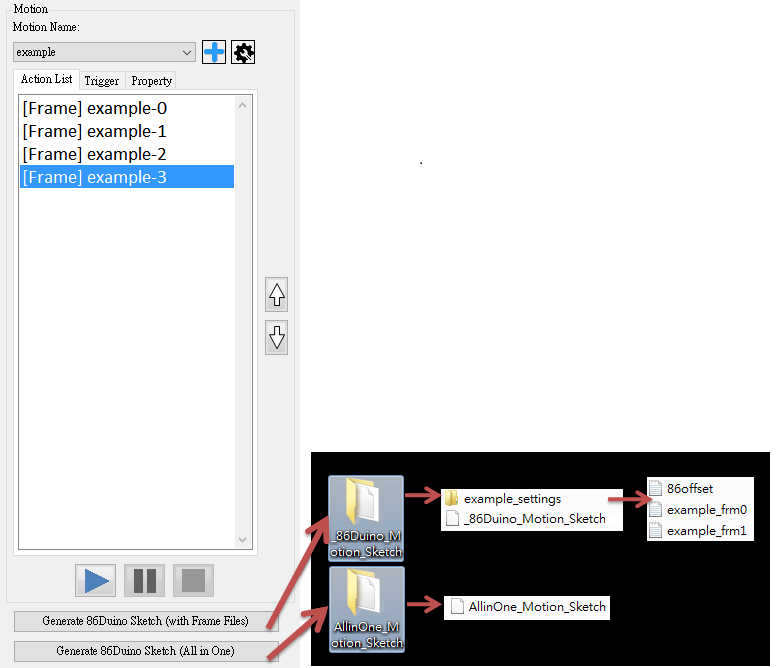
inoプログラムを86Duinoに書き込むだけでなく、正しく実行するためには、生成された設定フォルダを86Duino SDカードのルートディレクトリに置く必要があります(86Duino SDカードを作成します)。 Generate 86Duino Sketch (All in One) は、結果のプログラムが86Duinoに焼き付けられている限り、1つのinoプログラムのみを生成します。
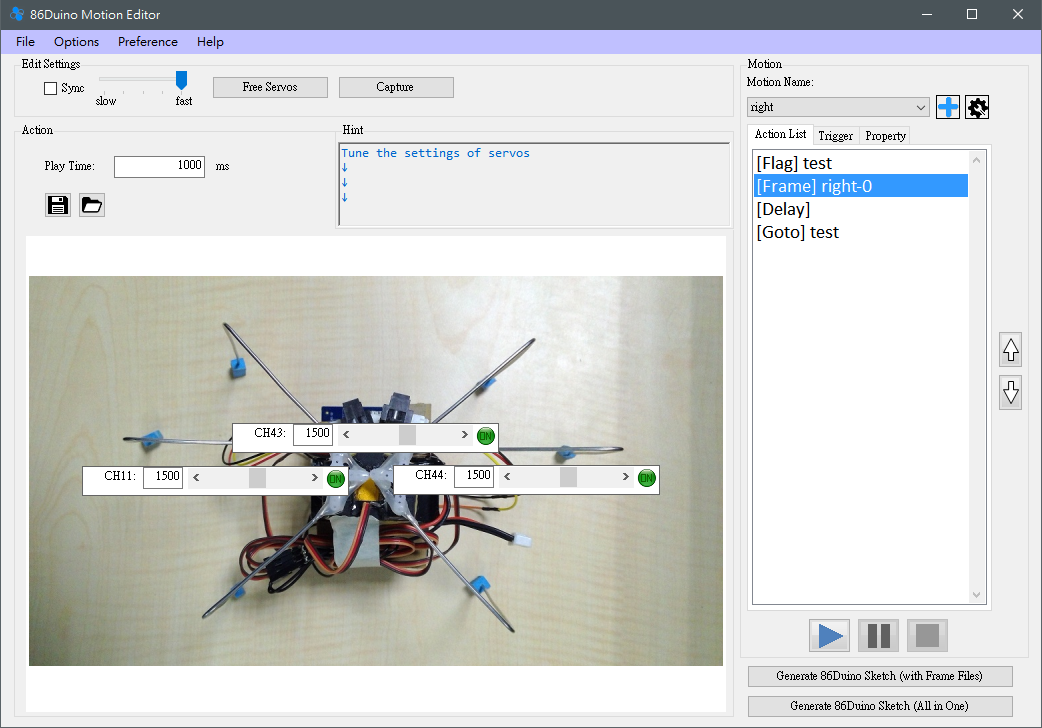
6.このブロックは、各フレームのモーターの角度など、アクション リスト内の各アクションの詳細を変更するために使用されます。 これを行う方法を詳細に示すために、より完全な使用例を以下で説明します。
使用例
この例では、ユーザーに 86ME のプロセスを理解させることを望んでおり、86ME を 3 つのサーボ モーターで構成されるヘキサポッド ロボットとして使用します。 この6台分は86Duino Zeroが1台、本体がDMP_RS0263 3台分で、左足、中央足、右足はそれぞれ86Duinoの11足目、43足目、44足目に対応しています。

ステップス :
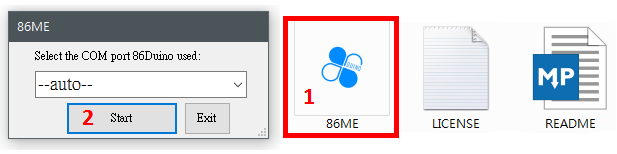
- 86MEフォルダの左86ME.exeをダブルクリックします。
- –自動–を選択してCOMポートに自動的に接続し、スタートボタンを押します。
ステップ2 :
- [新しいプロジェクト] をクリックして新しいプロジェクトを追加すると、[ロボット構成] ウィンドウがポップアップ表示されます。
- 86Duino ボードを 86Duino Zero に設定します。これは、この例では 86Duino モデルで、IMU がないため None に設定されています。
- ピン11、43、44をモーター DMP_RS0263サーボモーターとして設定し、オフセット、ホームフレーム、Max&minをユーザーのニーズに応じて設定できます。 IMU 補正アスペクトは、補正なしに設定されています。
- OKボタンを押して設定を完了します。
ステップ3 :
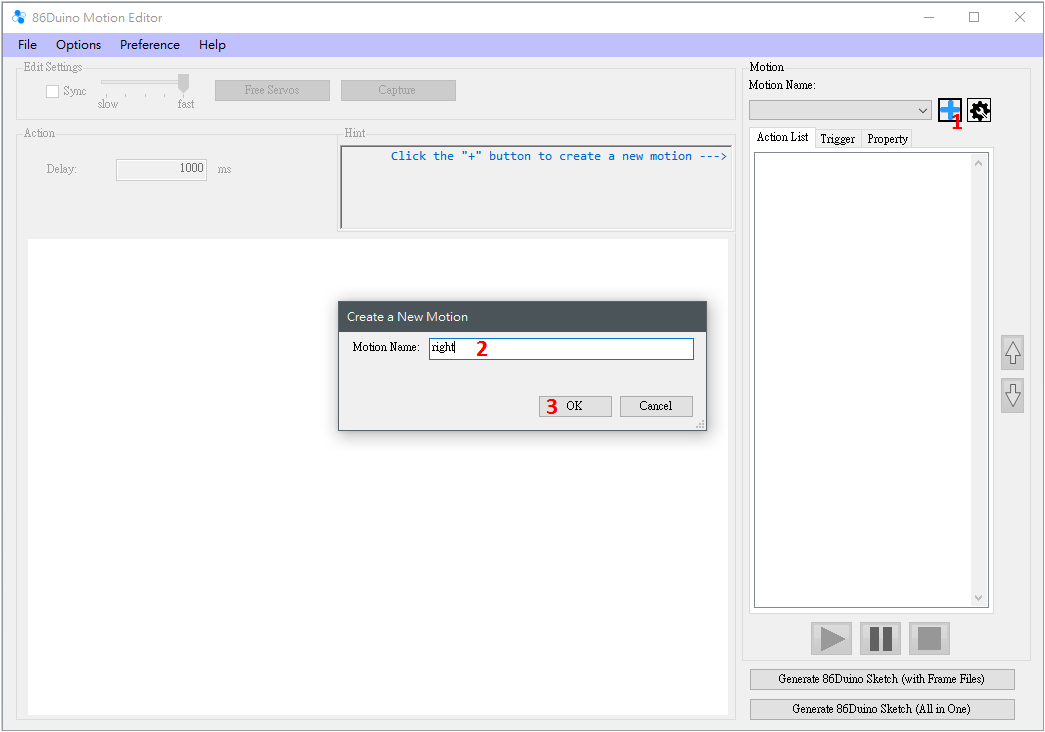
- プロジェクトが作成されると、「+」ボタンが点灯し、このボタンを使用して「+」ボタンを押して新しいアクションを追加できることがわかります
- 「新しいモーションを作成」ウィンドウがポップアップし、「モーション名」フィールドに追加するアクションの名前を入力します(この場合は右)。
- 「OK」を押してアクションの作成を完了します
ステップ4 : 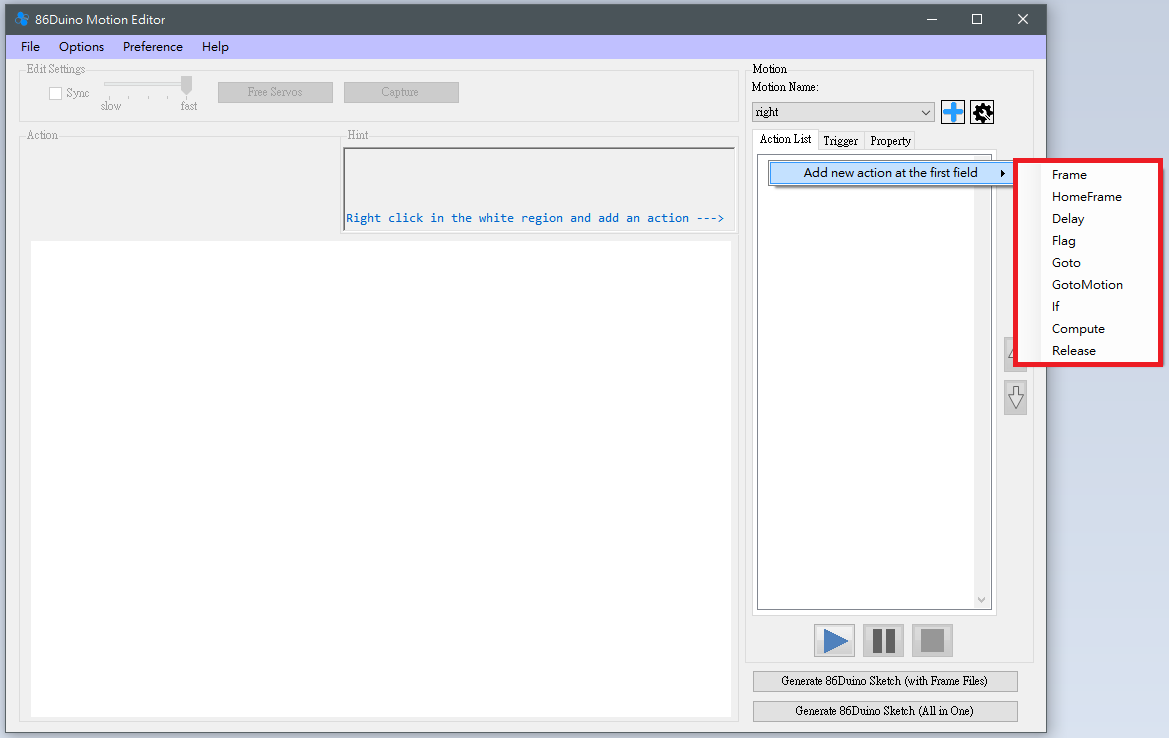
[アクション リスト] の下の空白スペースの最初のフィールドで [-> アクションを追加] を右クリックしてアクションを選択し、アクション バーにアクションを追加します。
アクションには 9 つのタイプがあり、その機能は次のとおりです。
フレーム
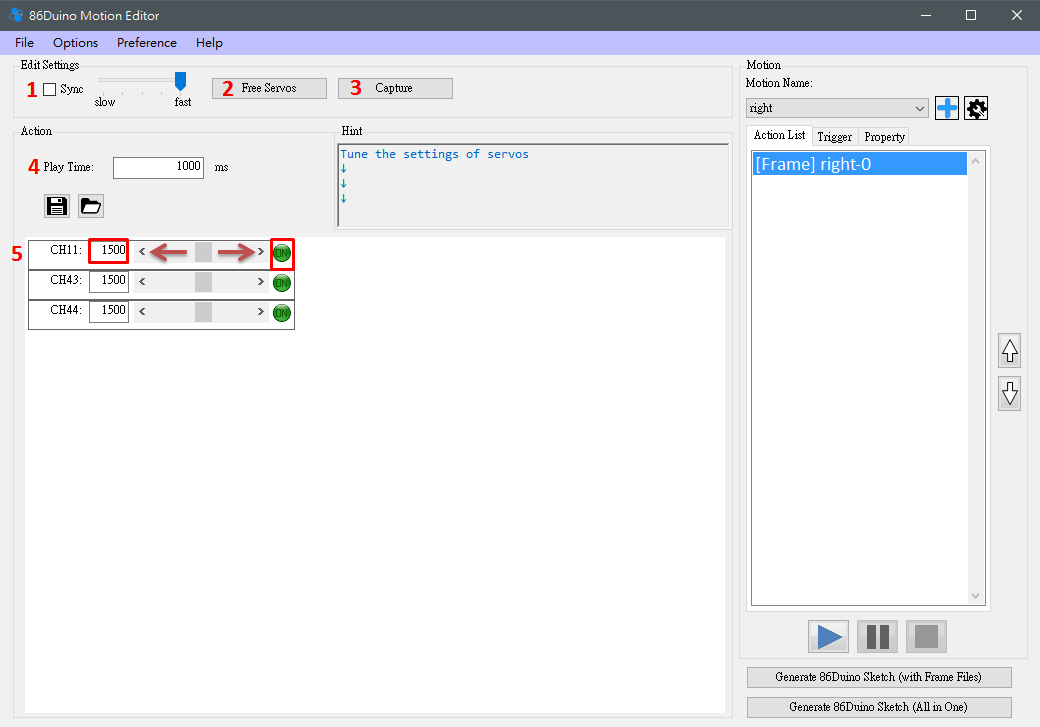
フレームを選択すると、最初に設定された3つのモーターを調整でき、ユーザーが調整できるようにいくつかの機能がオンになります。
- 「Sync」を押すと、ロボットは現在の設定値に即座に反応し、次のリールを動かしたり、Syncにチェックを入れながら数字を変更したりすると、ロボットは即座に反応します。 Syncの横にあるプーラーは、Sync中にモーターが回転する速度を調整できます。
- [フリーモーター]ボタンは、出力状態にあり、出力されなくなったすべてのモーターを解放します。
- キャプチャは、現在のモーターの角度を読み取るために使用され、現在サポートされているモーターは近藤、ハイテック、双葉の3つのシリーズであり、キャプチャ機能は最初にすべてのモーターを解放するため、ロボットがうまくサポートされていないと、ロボットが落下する可能性があります。
- Play Timeは、現在設定されているモーターの角度に移動するのに何ミリ秒かかるかのことで、直接数字を入力して設定することができますが、0に設定するとアクションがスキップされますので、Play Timeの設定を忘れずに行ってください。
- モーターに送信するPWM信号の値を設定します。リールを引くか、値を入力することで設定できます。 右端には円形のボタンがあり、モーターを同期させるかどうかを決定するために使用され、デフォルトでは、すべてのモーターは同期時に与えられた目標PWM値に従って回転し、緑色の「ON」と表示され、このボタンをクリックすると、画像が赤い「OFF」に変わり、モーターの出力が停止します。この機能は、長時間の出力による焼損を避けるために、現時点では編集する必要のないモーターを休ませることができます。
遅延
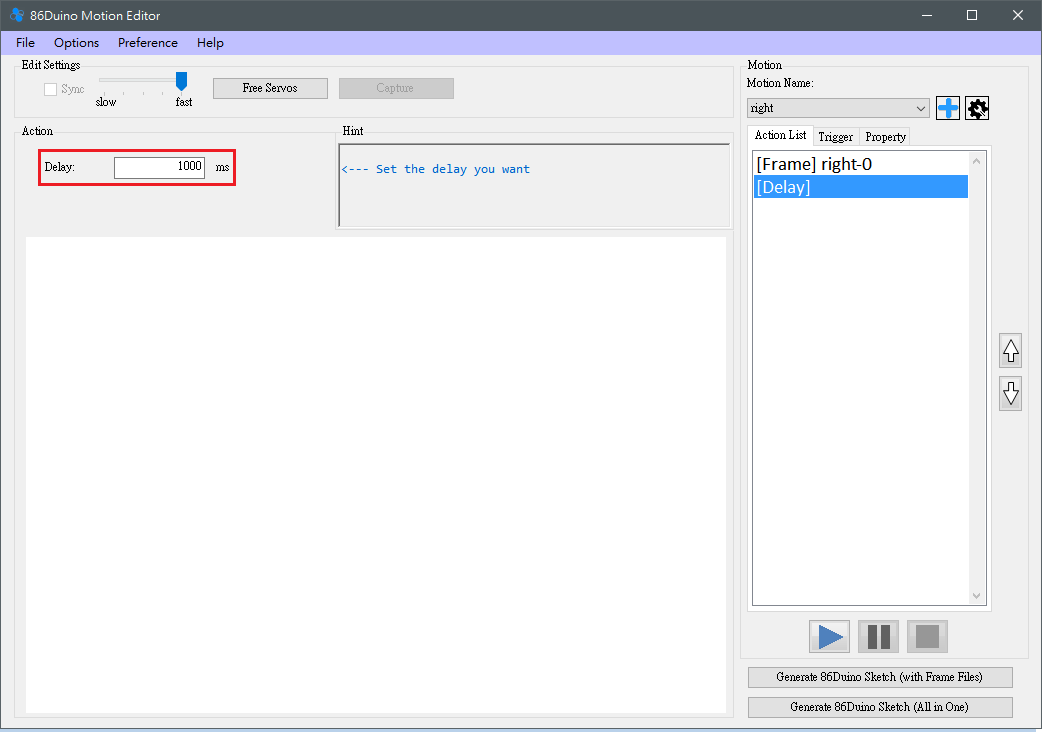
ユーザーは遅延を設定でき、ここでの遅延は単に停滞し、ロボットがアクションを起こすことを許可しません。
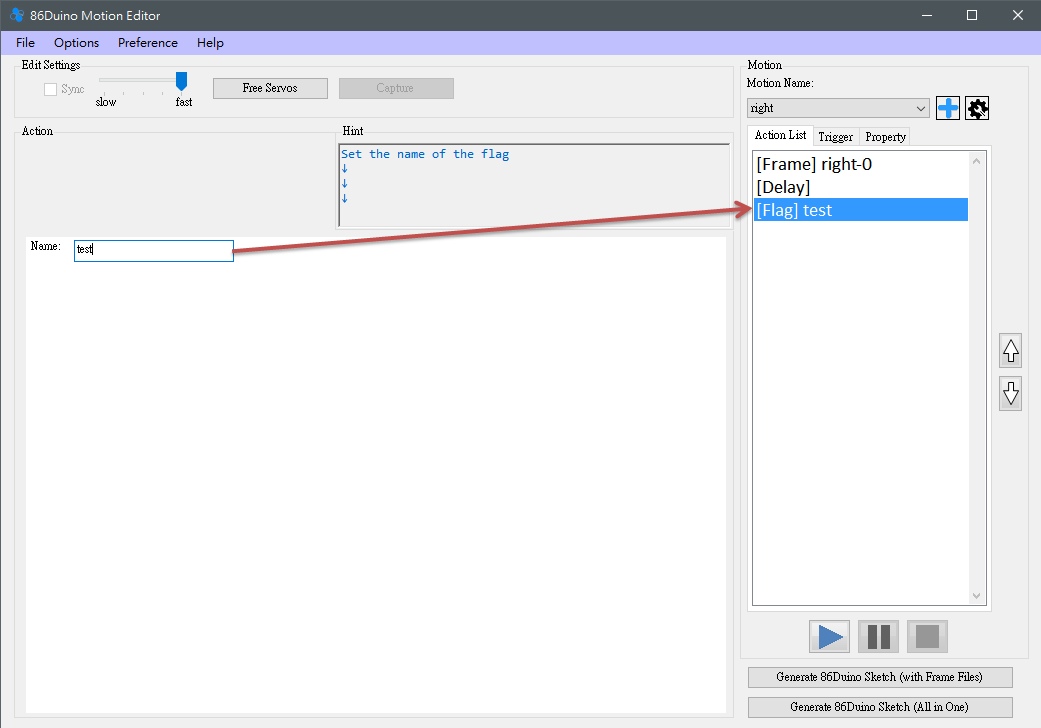
フラッグ&ゴウ
- Goto と Flag を使用すると、ユーザーはフレームの長いリストを書き込むことなく、ループ方式でアクションをテストできます。 フラグを設定する必要があるのは、アクション リストのフラグが設定したばかりの名前に追加されているかどうかを確認するためだけであり、追加されている場合は正常に設定されます。
- Gotoは名前の設定に加えて、ループの数とGotoで回数をトリガーするかどうかも設定する必要があります。または、無限のジャンプを選択できます。 Gotoの詳細な動作は、再生状態でGotoに実行されると、このGotoを実行したいかどうかを確認し、実行されている場合はGotoが設定した対象フラグの名前を探し、再度Flag側からアクションの実行を開始するというものです。
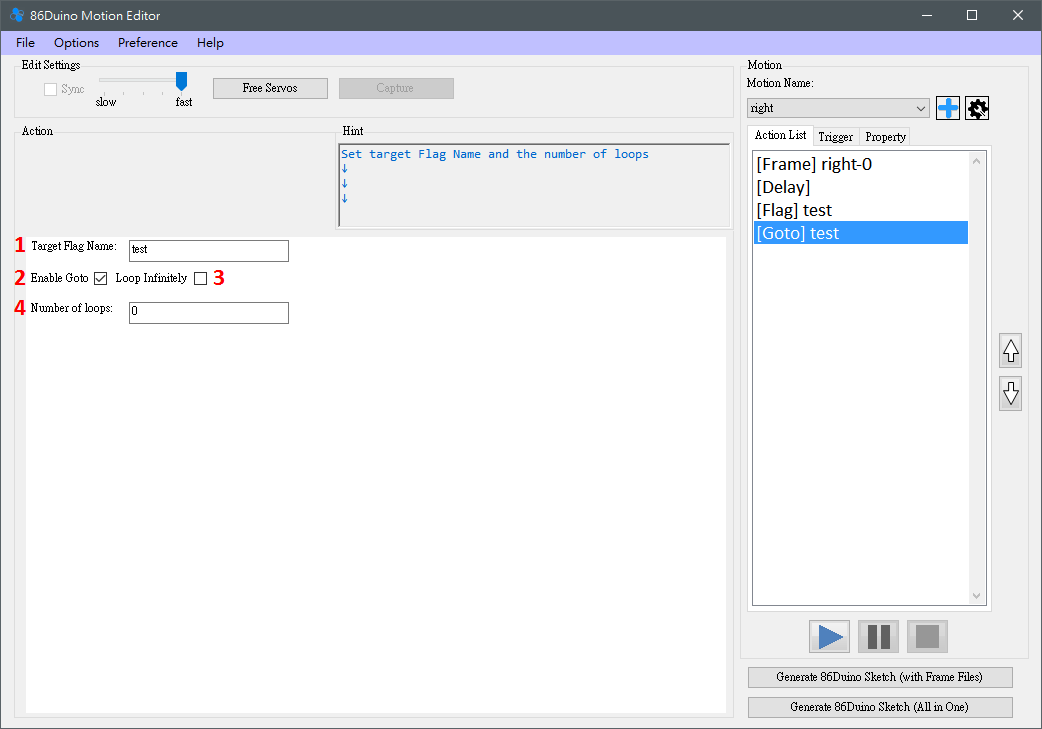
- ターゲット フラグの名前を書き込み、作成したフラグと同じテストを記述します。
- 実行するかどうかを設定します。
- Gotoを無限に実行するかどうかを設定します。
- 実行回数を設定します。
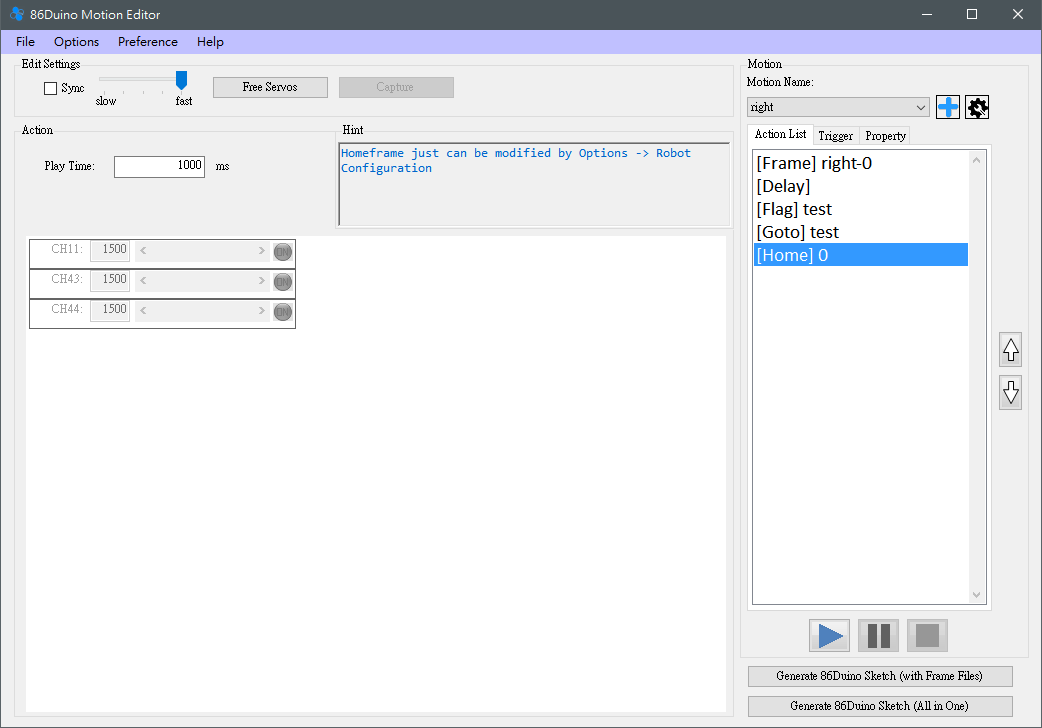
ホームフレーム
HomeFrameを選択すると、値が初期位置で変更できないフレームが含まれ、HomeFrameの値はOptions -> Robot Configurationでのみ変更できます。 この選択は、ユーザーが自宅に戻るのを容易にし、自宅に戻るアクションが実行される場所を特定できるようにするためです。
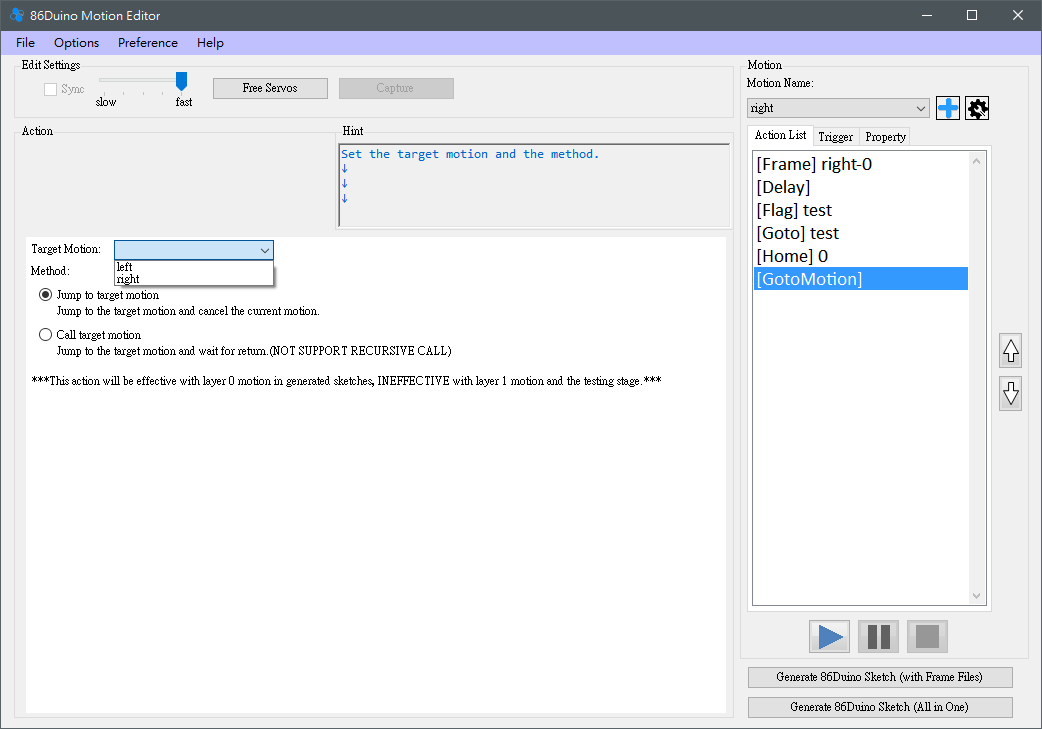
ゴトモーション
GotoMotionを使用すると、ロボットを他のモーションで簡単に動作させることができ、ターゲットモーションとメソッドを簡単に構成するだけで済みます。 一方、GotoMotionは結果のプログラムにのみ反映され、現在、テスト用の86MEでの再生はサポートされていません。
- ターゲットモーション:ターゲットモーションを選択するときは、86MEが現在、自分自身に電話をかけたり、お互いに電話をかけたりするなどの再帰的な呼び出しをサポートしていないという事実に特別な注意を払う必要があります。これは予測不可能なアクションにつながる可能性があるため、特に注意してください。
- 方法:分為 Call target motion、Jump to the target motion,Call target motion 會在執行完 target motion 後繼續執行目前 Motion 剩餘的 Action;Jump to the target motion 則不會回到目前的 Motion
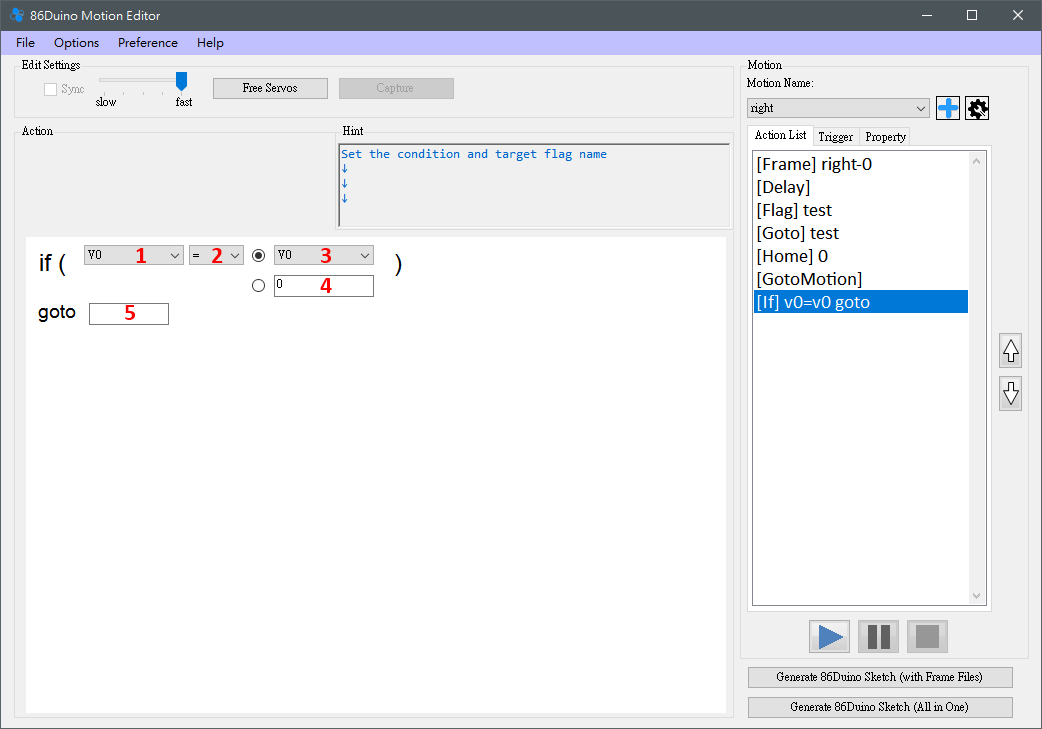
もし
アクション編集の柔軟性を提供する場合、現在、ユーザーが使用できる50の変数といくつかの実用的なシステム変数が提供されており、設定された判断条件が真である限り、指定されたフラグに移動します。
- 左のサブ変数「V0~V49」をユーザーが使用できる変数として設定し、これらの変数が各アクションで共有されることに注意してください。 その他のシステム変数は、86Duinoの現在時刻(ms)を表す「NowTime」、乱数を表す「Random」、86DuinoのA0~A5を読み取るための「Analog0~Analog5」、加速度センサーX、Y、Z加速度センサーの3軸を示す「AccX/Y/Z」、現在のIMUのベースオリエンテーションと比較した「GyroRoll」と「GyroPitch」です X軸に相当、PitchがY軸に相当し、「VKeyUp」「VKeyDown」などが仮想ボタンで、ボタンが押されていないときは値が0、押されているときは0以外で、仮想キーボードはPS2のジョイスティックに対応可能。
- 左右の変数 (サポートする等しい、等しくない、より大きい、より小さい) の判断を設定します。
- 左のサブスタイルと同じ右のサブスタイルを設定しますが、仮想ボタンは選択できません。
- 正しいサブフォーミュラが一定の場合は、この方法を選択して数値を入力できます。
- 目標を if is true にジャンプするように設定します。
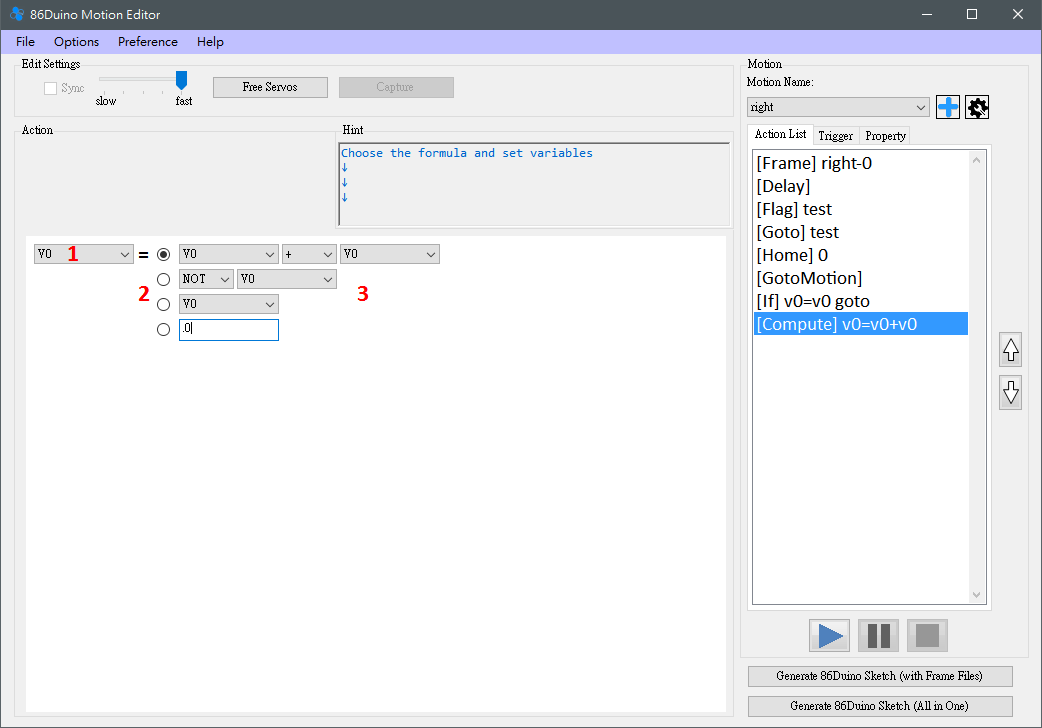
計算する
Compute は、簡単な計算を実行し、指定した変数 (V0~V49) に値を格納するために使用できます。
- 左サブの変数を設定するには、「V0~V49」を選択できます。
- 使用する式を選択すると、最初の式は、加算、減算、乗算、除算、累乗、剰余、ANDおよびORの2つの変数に対して演算を実行できます。 2番目の式は、NOT、オープンルート番号、exp、対数、絶対値、負の符号、sin、cosなどの特定の変数に対する演算を提供します。 3 番目の公式は単純な割り当てです。 第 4 に、数式では定数を指定できます。
- 選択した式を設定したら、完了です。
解放
このアクションは設定する必要はなく、実行された直後に動作し、ロボットが危険(落下など)に遭遇しそうになったときに使用して、モーターの過度の力による損傷を即座に回避できます。
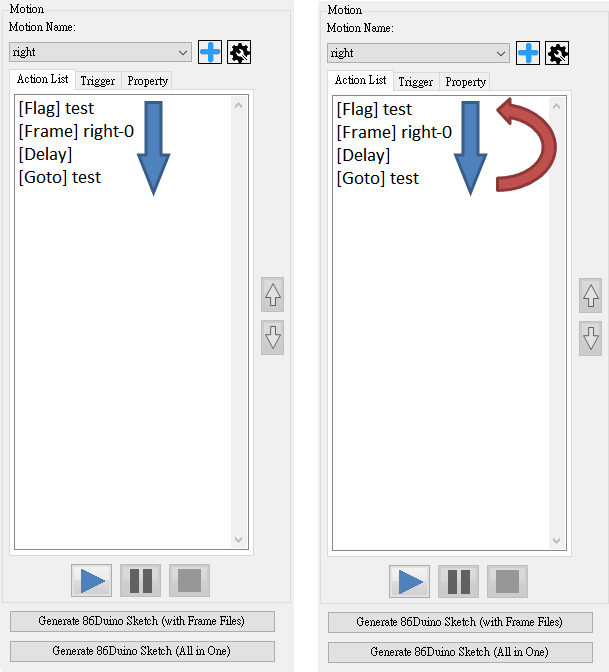
ステップ5 :
目的のアクションを編集した後、再生ボタン、一時停止ボタン、停止ボタンを使用してテストでき、一般的な実行シーケンスは左下の図の通り、Gotoを実行している場合は右下の図のようになります。
その後、ユーザーは別のアイテムの編集を続行するか (ステップ 2 に戻る) か、別のアクション (ステップ 3 に戻る) を選択できます。 または、アーカイブ (File->>Save Project) を選択した場合、.rbm ファイルが生成され、次回それを使用するとき (File-Load Project) は、最後に保存したプロジェクトを引き続き使用できます。
画像を追加します。
この機能の目的は、ユーザーがロボットに対応するモーターの位置をアイテムを読み取るたびに思い出す必要がないように、ユーザーがモーターに対応しやすくすることです。 新規プロジェクトの追加時(ファイル-新規プロジェクト>)やプロジェクト設定の変更時(オプション->ロボット設定)にロボット画像を追加でき、ロボット画像の読み込みボタンでPNG、JPG、GIFファイルをロボット画像として読み込むことができます。 一度読み込んでしまえば取り外すことはできず、一度設定するとアクションリストのフレームタイプのアクションでモーターを自在に動かすことで、モーターとロボット部分に対応する効果を得ることができます。
画像を読み込んで保存してしまうと、保存されている.rbmファイルはパソコン上の画像のパスを記憶しているので、画像の場所が変更になったり削除されたりすると、次にプロジェクトを読み込んだときに見つからない可能性がありますので、ご注意ください!
画像を読み込んで保存してしまうと、保存されている.rbmファイルはパソコン上の画像のパスを記憶しているので、画像の場所が変更になったり削除されたりすると、次にプロジェクトを読み込んだときに見つからない可能性がありますので、ご注意ください!
オリジナルコード
86MEはオープンソースのアクションエディタであり、ソースコードはGitHubで公開されており、興味のある友人がダウンロードまたは共有することを歓迎します。 このプロジェクトは、Windows 7/10 + Visual Studio 2013 Community Edition でビルドされています。
ドキュメントに対する修正や提案は、フォーラムに投稿できます。