getPPU()
説明
指定された軸のマシンのPPU値を取得します。
PPU(Pulse per Unit)の関係は次のとおりです。
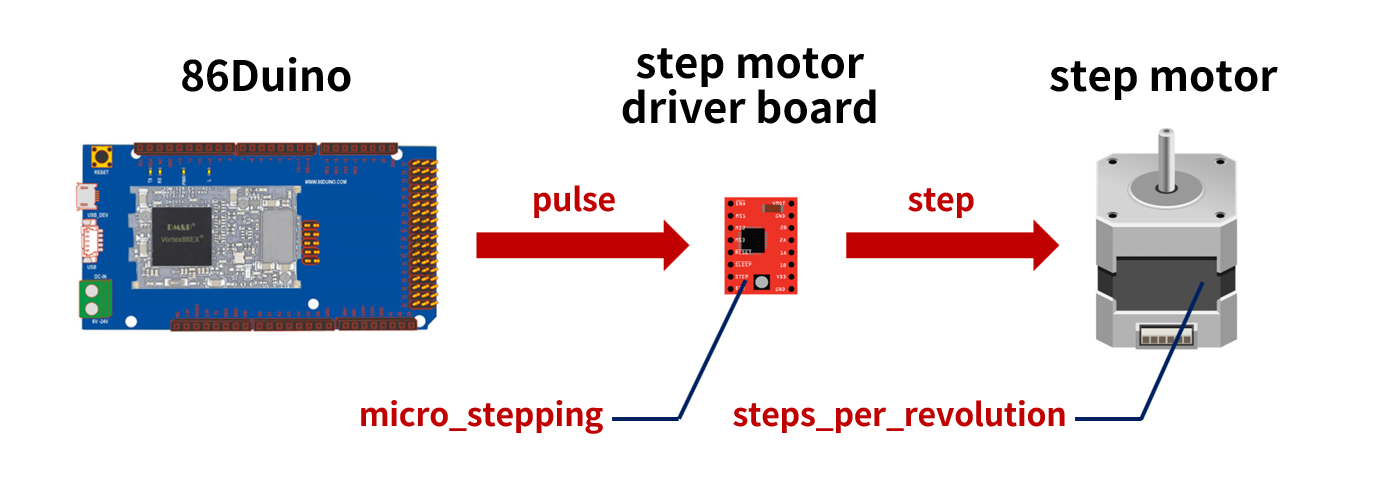
86Duinoはステッピングモータードライバーボードにパルスを送信し、ドライバーボードはステップを送信してステッピングモーターを回転させます。
micro_stepping: – ステッピングモータードライバボードのパラメータ。1ステップを生成するには、86Duinoから受信するパルス数が必要です。
steps_per_revolution: – ステッピングモーターのパラメータ。1回転を生成するには、ステッピングモータードライバボードから受信するステップ数が必要です。
pulses_per_revolutionの計算式は、steps_per_revolution * micro_steppingです。
PPU: 機械軸が単位距離あたりに出力する必要があるパルス数です。例:80 pulses/mm。
構文
machine.getPPU(axis);
パラメータ
machine: Machine オブジェクト。
axis: PPU を取得する軸。AXIS_X、AXIS_Y、または AXIS_Z のいずれかです。
戻り値
double: 軸の PPU 値を返します。
参照
getPulseMode()
computePPU_Belt()
computePPU_LeadScrew()
ライブラリリファレンスのメインページ
86Duino の参考資料は、クリエイティブ・コモンズ 表示-継承 3.0 ライセンス に準拠しています。参考資料に含まれるコード例はパブリックドメインとして公開されています。