getPPU()
描述
取得机器在指定轴的 PPU 值。
PPU(Pulse per Unit) 关系如下图:
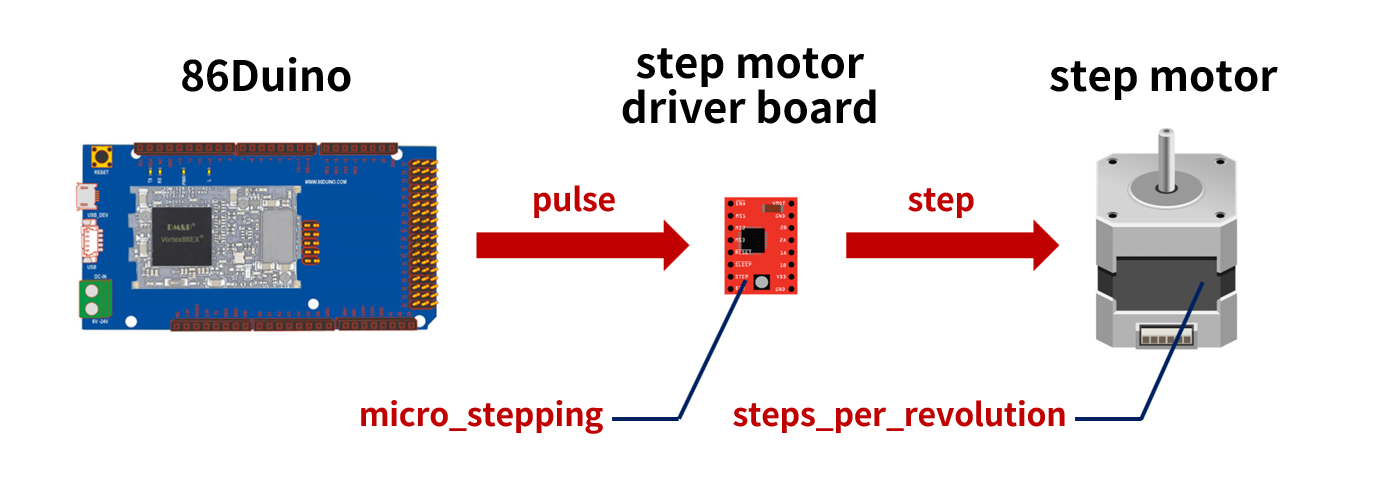
86Duino 发送 pulse 到步进马达驱动板,驱动板便会发送 step 使步进马达旋转。
micro_stepping: - 步进马达驱动板上的参数,若要打出一个 step,需从 86Duino 接收到的 pulse 数。
steps_per_revolution: - 步进马达上的参数,若要转动一圈需从步进马达驱动板接收到的step数。
pulses_per_revolution 之计算公式为 steps_per_revolution * micro_stepping。
PPU: 即机器轴欲移动每单位距离,需要输出多少个 pulses。比如说 80 pulses/mm。
语法
machine.getPPU(axis);
参数
machine:为 Machine物件。
axis:为欲取得 PPU 之运动轴,可为 AXIS_X, AXIS_Y or AXIS_Z。
回传
double:回传该运动轴的 PPU 值。
See also
getPulseMode()
computePPU_Belt()
computePPU_LeadScrew()
函式库参考主页面
86Duino 参考资料的文本遵循 知识共享署名-相同方式共享 3.0 许可证。参考资料中的程式码范例已发布到公共领域。