86Duino 讀取 KONDO 伺服機回傳角度的連接範例
KONDO 伺服機除了可以轉到指定位置之外,還可以回傳目前伺服機的角度,即角度回授(feedback)。
86Duino Coding 210 版本以後,Servo86 函式庫支援 KONDO KRS-786、KRS-788HV、KRS-4012HV、KRS-4014HV 伺服機的角度回授功能,您可以呼叫 capture() 去取得目前角度。
KONDO 伺服機控制板是透過 PWM 信號線,送出讀取命令給 KONDO 伺服機後,再讀取回傳角度。若改用 86Duino 讀取角度,在 PWM 信號線上需注意阻抗匹配問題,以下我們將以 KONDO KRS-786 為例,介紹如何使用 86Duino 來讀取伺服機角度。
連接 KONDO KRS-786 的方法
請準備以下材料:
- 86Duino(這裡以 86Duino One 為例)
- 單芯線數條
- 5k 歐姆以下的電阻一個
- 麵包板一塊
- KONDO KRS-786 伺服機一顆
準備好以上材料後,請用一條單芯線將 5k 電阻一端連接至 3.3V 輸出腳(如下圖中的綠線),再將伺服機的 PWM 信號線連接至電阻另一端,同時再連接 PWM 信號線和 86Duino Servo 腳位(如下圖中的黃線),最後將伺服機的電源線(紅線)接上 86Duino 的 Vin,伺服機的地線(黑線)接上 86Duino 的 GND,即完成連接:
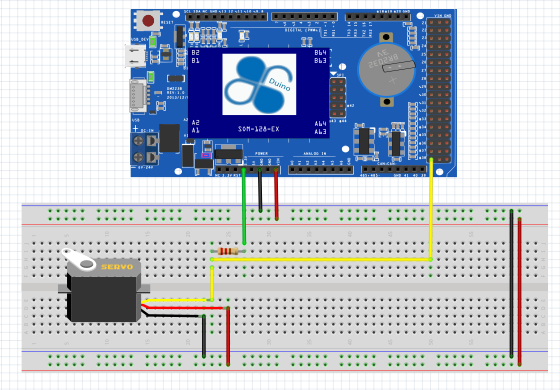
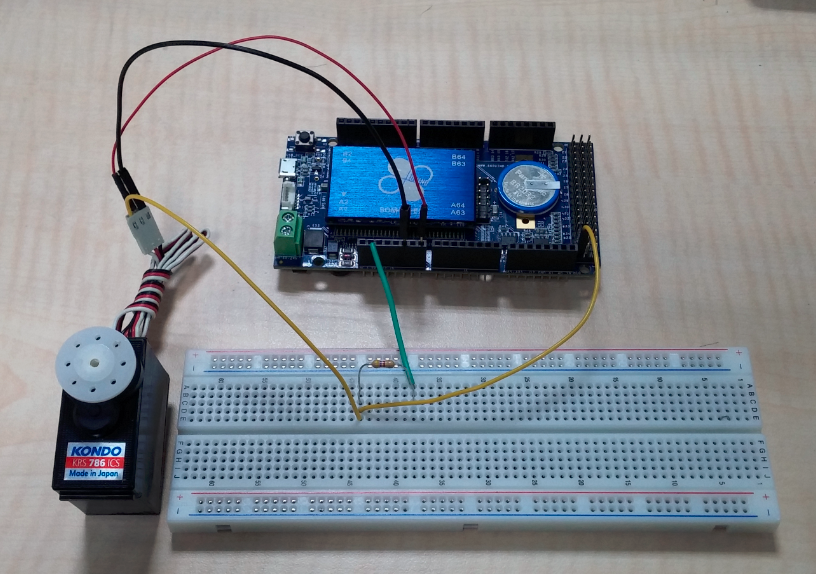
實際連接圖如下:
連接完成後,您可以使用 Servo86 函式庫的 capture() 來讀取 KONDO 伺服機目前的角度。
The text of the 86Duino reference is a modification of the Arduino reference, and is licensed under a Creative Commons Attribution-ShareAlike 3.0 License. Code samples in the reference are released into the public domain.