86スパイダー組立教学
プロジェクトの由来
このプロジェクトはスコーピオンスキャナに由来し,
「やっぱり、スパイダーロボットはいいなぁ!」とボスは思った。
「恩卓博士、私たちはU大を買いましょう!彼に3Dプリンタのスパイダーロボットを作らせましょう!」
そうして恩卓博士はビールと焼き肉の串を持ってU大を捜しに行き、
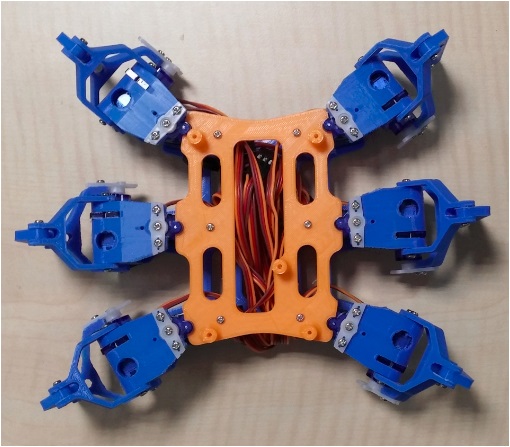
後日、世界でたった一台の86スパイダーがこのようにして誕生したのである。
機能説明
本プログラムは 86Duino Enjoy , 86Duino Zero , 86Duino Oneを使用し、鋭利な道具を使用するため、制作時は、お子さんに家族の同伴が必要であり、動作コードは 86MEを使用し、プログラムを入力しなくても、86スパイダーを作動することができる!
準備材料
- 86Duino One と 86Duino Zero 1個
- Tower Pro SG90サーバー (多めに準備してよい) 12個
- 3Dプリンタ(このプロジェクトでは印匠ENJOYを使用)
- 2mm x 4mm ボルト
- 2mm x 8mm ボルト
- 2mm x 15mm ボルト
- ケーブル
- 電子拡張版 (for 86DuinoZero)
- ケーブルピン
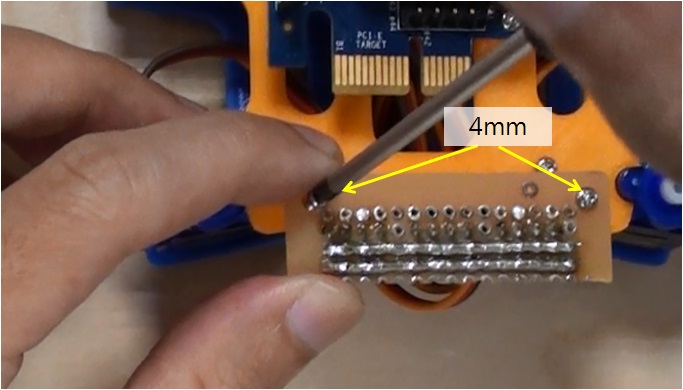
電子拡張版の電子回路はとてもシンプルなものだが、みなさんが作製せれるとき、コテを使用するため、お子さんが作製される場合は、大人の同伴が必要です。
機構コピー
まず 86DuinoRepetier-Host をインストールし、印匠ENJOY 快速入門教学参照すること。
インストール完成後Thingiverseホームページの86スパイダー STL フォルダをダウンロードし、
下図の6個のフォルダの圧縮を解凍すること:
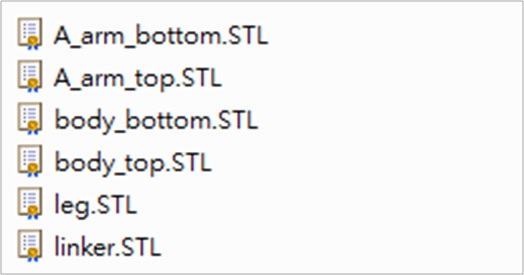
部品名称と実際の対応図:
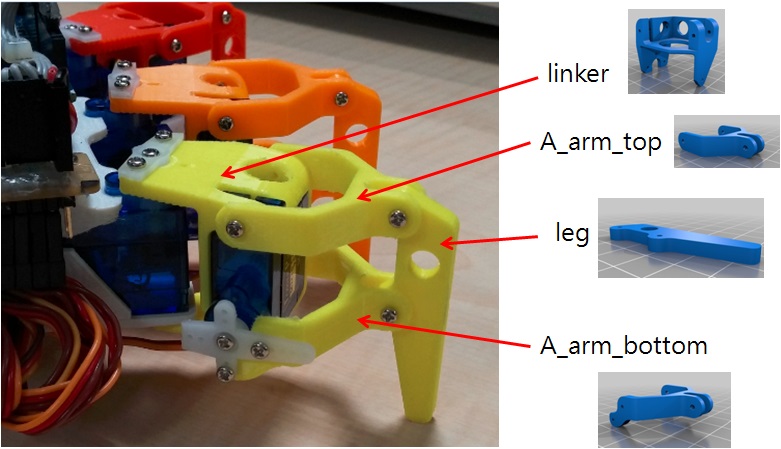
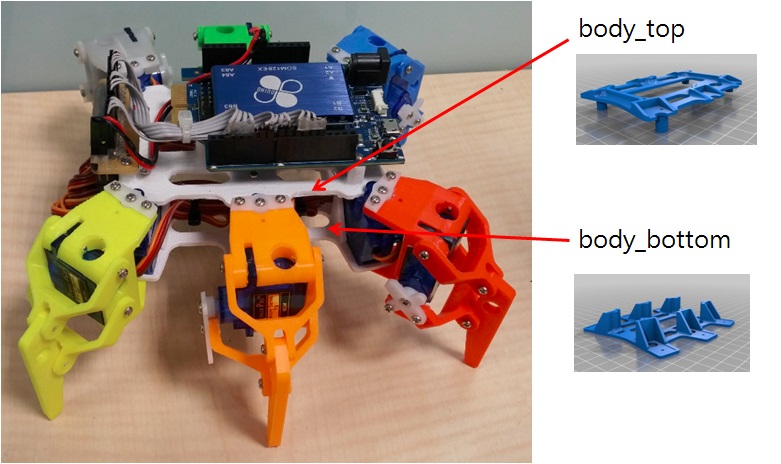
A_arm_bottom、A_arm_top、leg、linkerはスパイダー脚部の組立パーツであり、この4個のパーツを組み立てて脚部を形成し、
body_topはスパイダー身体上部のパーツであり、
body_bottomはスパーだー身体下部のパーツである。
私たちが既にインストールしてある86DuinoRepetier-Hostを起動し、並びにLoadボタンをクリックする。86スパイダー脚部フォルダに有るフォルダ:A_arm_bottom、A_arm_top、leg 、linker
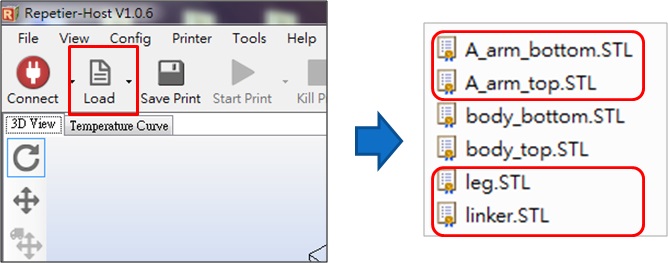
ダウンロード後の図は下図の通り:
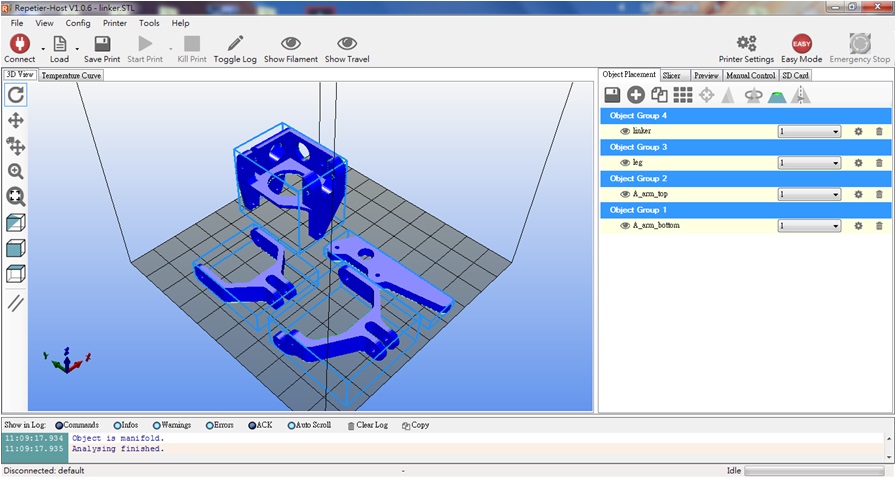
Linkerを選択し,パーツをY 軸にそって 90 度下図のように回転させる:
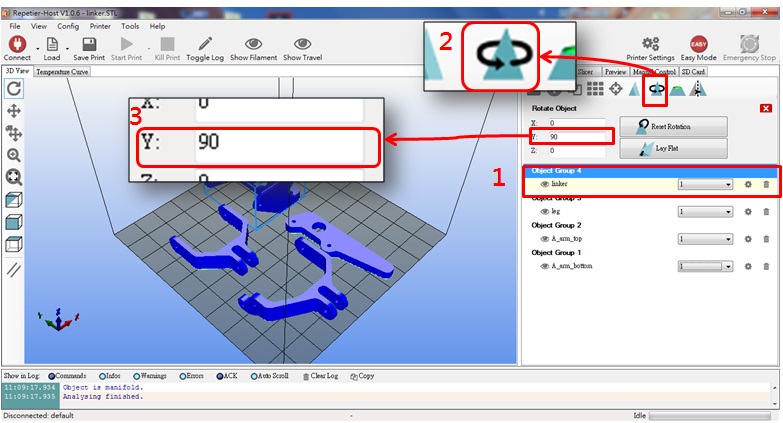
回転後のlinkerパーツは、下図のように置くこと:
A_arm_bottomを選択し、下図のようにパーツをY軸にそって180度回転させる:
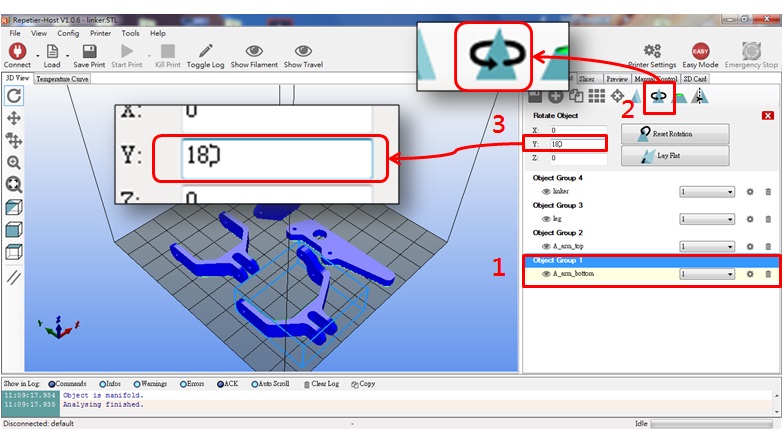
回転後のA_arm_bottomパーツは、下図のように置くこと:
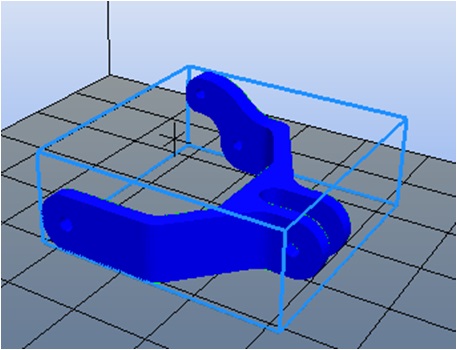
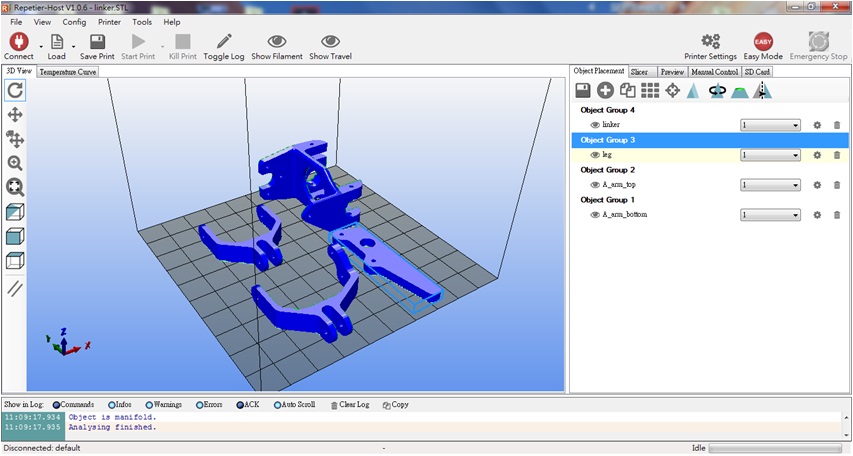
回転完了後の脚部パーツは下図の通り:
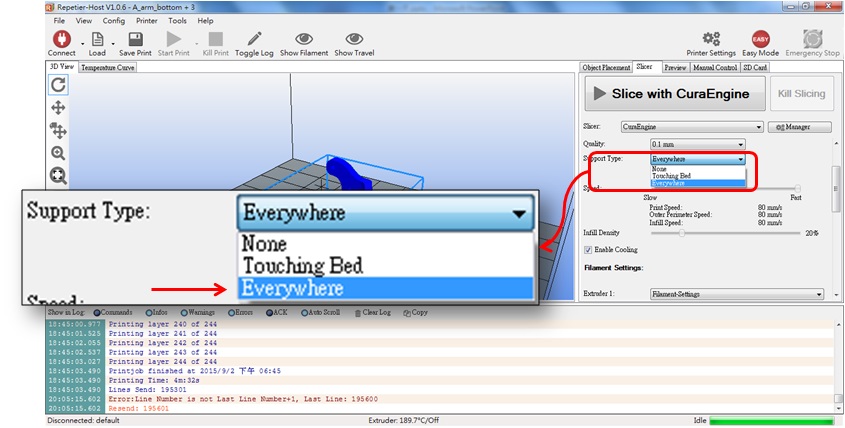
サポートページ選択後、Support Type を Everywhereと設定する:
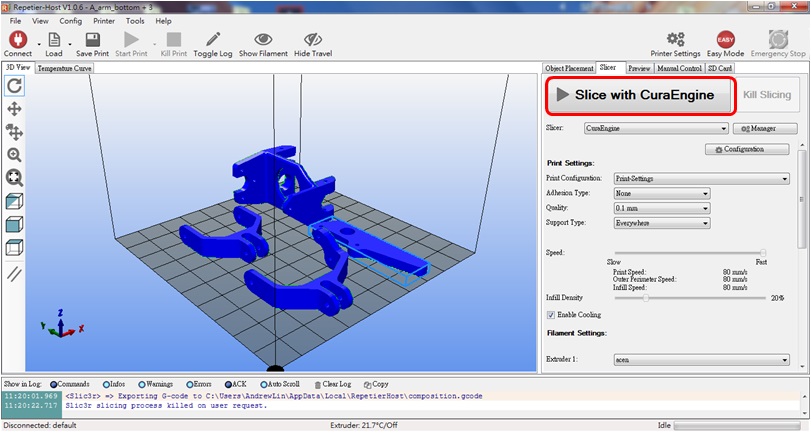
スライスボタンを押すと、進行を開始する
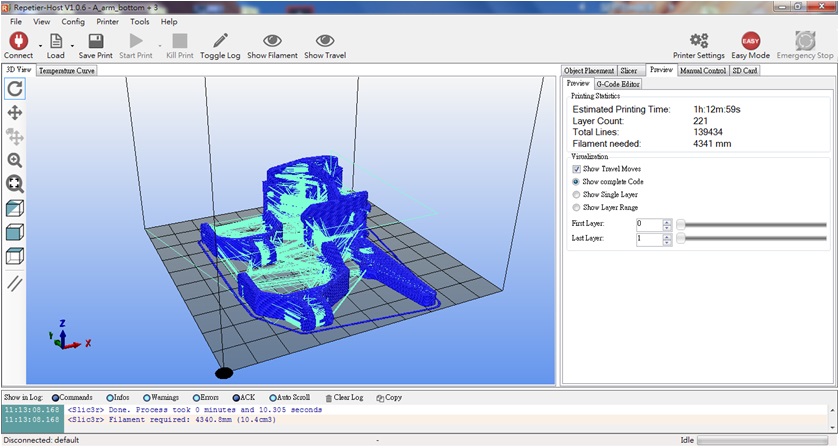
スライス完成後に下図のような画面が出る:
86Duino Enjoyの方法は2種類ある:
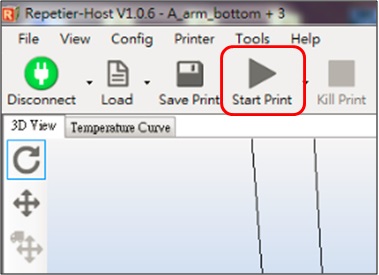
方法一: USB ケーブル使用
スライス完成後、直接プリントボタンを押すと、直ぐにプリントを開始する
方法二: SD カード使用
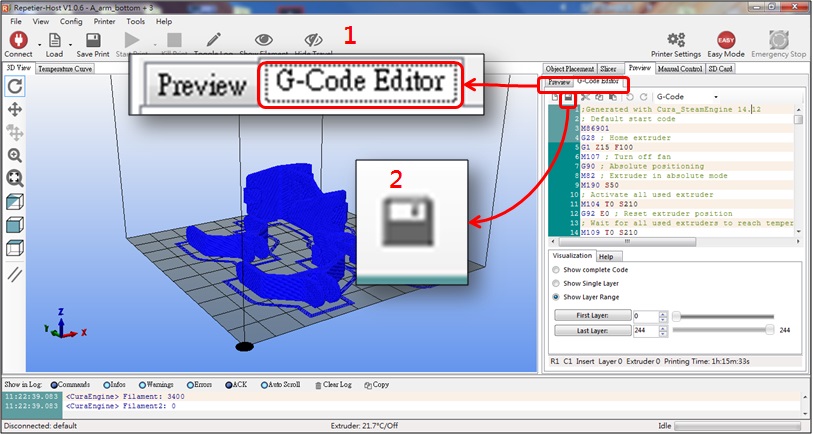
スライス完成後、下図の標示をクリックし、G-codeフォルダをSDカード内に保存する:G-Code Editorを選択する > 保存ボタンクリック
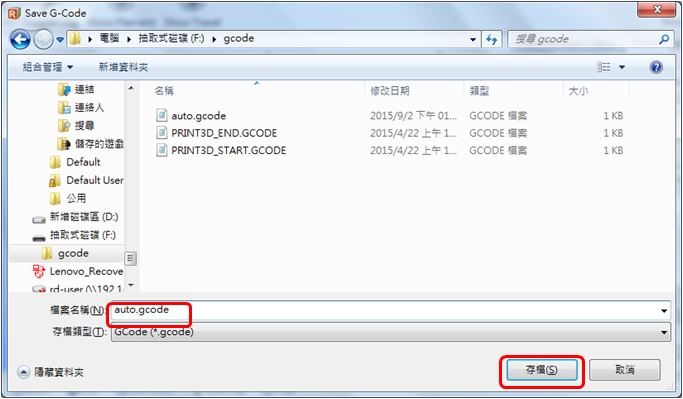
SDカード内のgcodeデータを取り出し、ファイル名をauto.gcodeに変更し、保存する
パソコンからSDカードを抜き取り、SDカードを86Duino Enjoy 背面のSDスロットへ入れ、
86Duino Enjoyの電源を入ると、86Duino Enjoはauto.gcodeファイルを自動読み取りし、プリントを開始する!
86スパイダーには下記一揃えのプリントが必要である:
脚部 6 個
身体上部 1個
身体下部 1個
パーツ組立
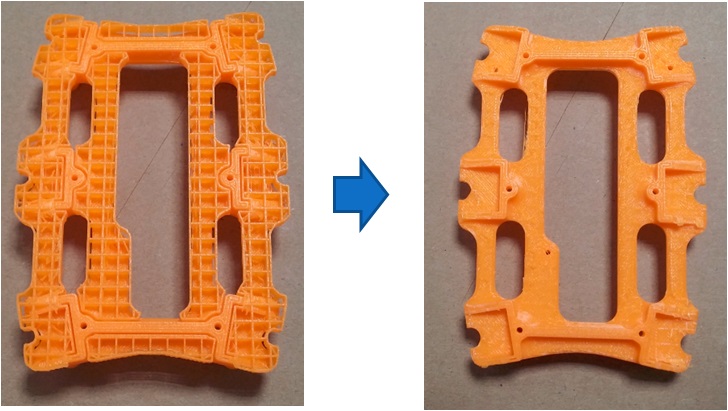
パーツ組立前に、サポート材料を綺麗に掃除し、磨く必要がある:
linkerパーツは、とがったやすりを使用し、サポートすること:
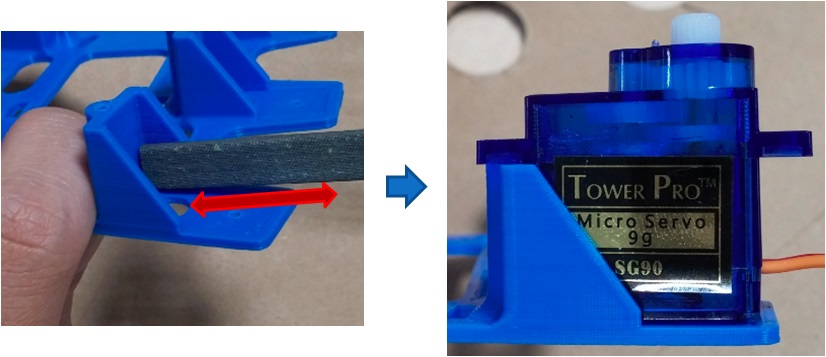
body_topパーツは、とがったやすりを使用し、サポートすること:
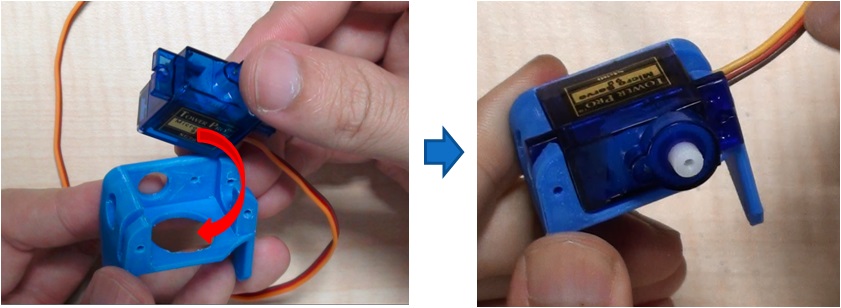
Linkerパーツを磨くときは、やすりででこぼこした表面を磨くこと:

磨き終わったら、サーバーの中に入れて完了:
body_topパーツを磨き終わったら、サーバーの中に入れて完了:
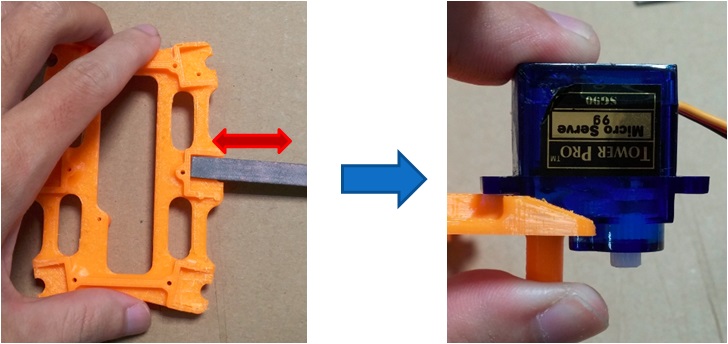
やすりを使用してbody_bottomとサーバーの接触表面を磨き、直接サーバーの中に入れること:
パーツ清掃と磨きが完了したら、穴を打ち抜き、タッピングすること:
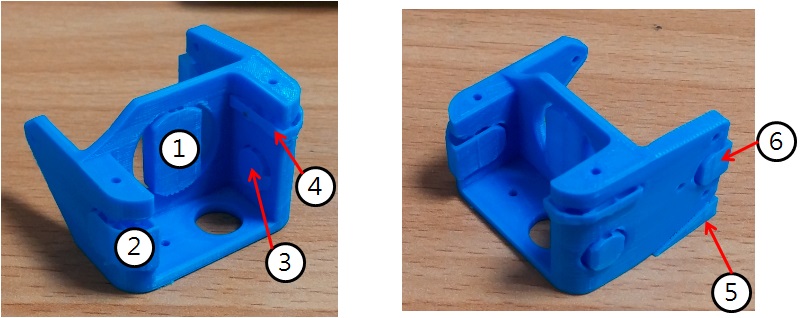
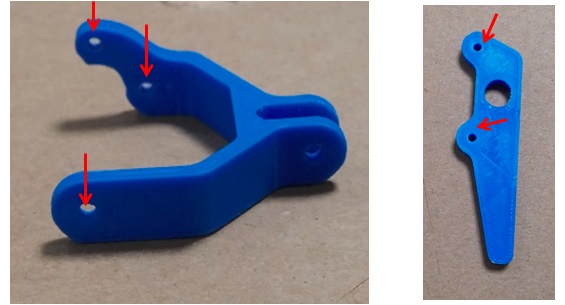
タッピングすべき穴は、下図に赤丸で示したところである:
Linkerパーツ:
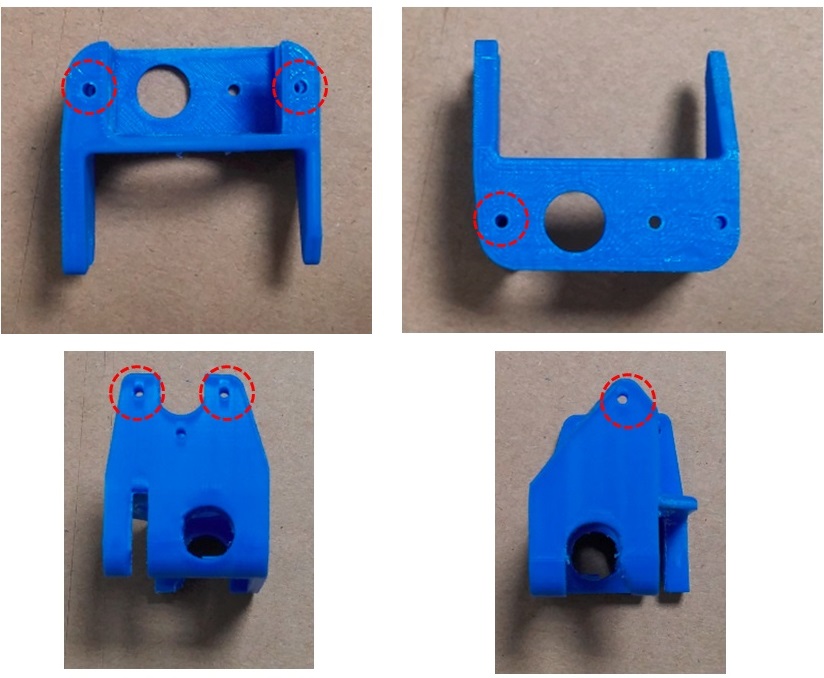
A_arm_bottom 、leg パーツ:
body_top 、body_bottom パーツ:
穴を打ち抜くべきなのは、下図に赤丸で示したところである:
Linker、A_arm_bottom、A_arm_top パーツ:
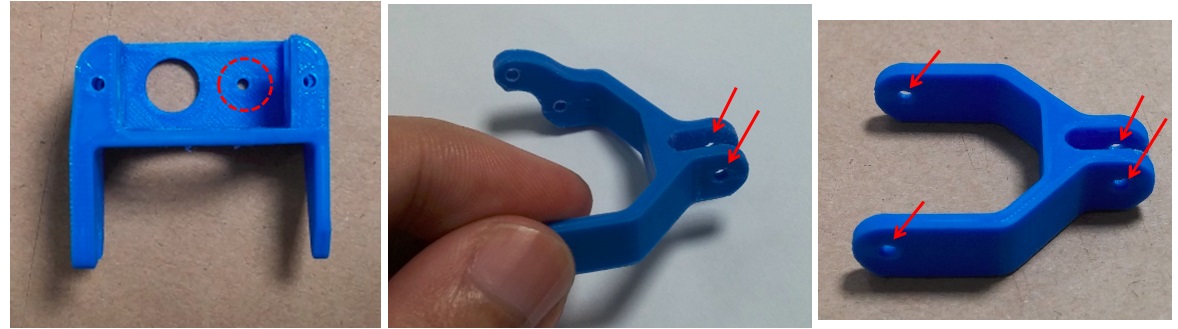
body_top、body_bottom パーツ:
完成後、私たちはターンテーブルをサーバーに取り付ける準備をするが、まず先にサーバーを秒帰零しなくてはならず、秒帰零機能とはサーバー振動の範囲を正中央とするものであり、私たちは Servo86ライブラリサーバーを利用して秒帰零し、並びに秒帰零プログラムを86Duino開発ボードにバーニングしなくてはならず、以下、範例プログラミングコードを提供する:
86Duino Zero 秒帰零プログラミング
#include <Servo86.h> // Servo86 ライブラリ使用
Servo myservo1; // Servo 初期化
void setup()
{
// Servo ピンを 2と設定
myservo1.attach(2);
// 1500us を送信する PWM シグナルにより,サーバの秒帰零は中点となる
myservo1.write(1500);
}
void loop() {}
86Duino One 秒帰零プログラミング
#include <Servo86.h> // Servo86ライブラリ使用
Servo myservo1; // Servo初期化
void setup()
{
// Servoピンを21と設定
myservo1.attach(21);
// 1500usを送信するPWM シグナルにより,サーバの秒帰零は中点となる
myservo1.write(1500);
}
void loop() {}
バーニング完了後、86Duino直ぐに指定のピンがdutyを1500usとしたPWMを送信するので、続いて私たちはサーバーと86Duinoを連結する。
86Duinoを電源/電池に接続した後、サーバーは直ぐに中点の位置を示すので、その時、十字型のパーツを盤の短軸に繋ぎ、下図で示したようにサーバーの出力軸にかぶせる。
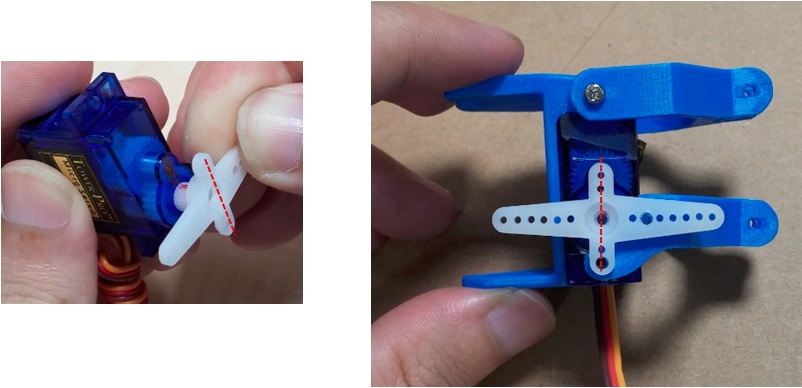
完英語直ぐにボルトでパーツをしめ、最後に下図のように完成するので、ニッパーでアクセサリートレイを整え、長すぎる部分を切除すること:
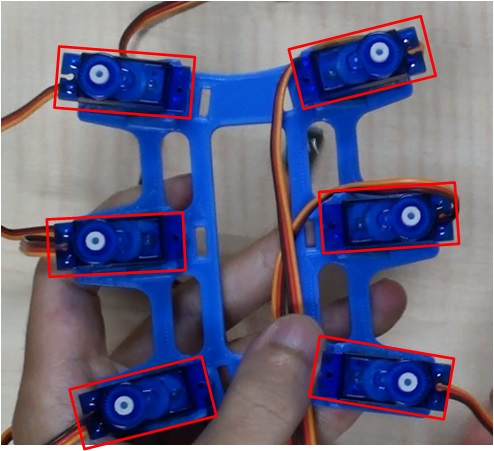
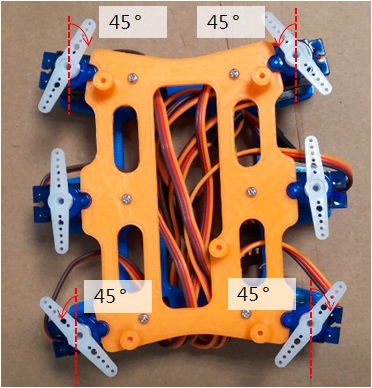
スパイダー脚部を身体部分に取り付け、6台のサーバーを下図のようにbody_bootom設置すること:
外側のサーバーを連結し、各身体の中央部にまで、長さを統一して端を出す(こうすることで、後の作業が楽となる):
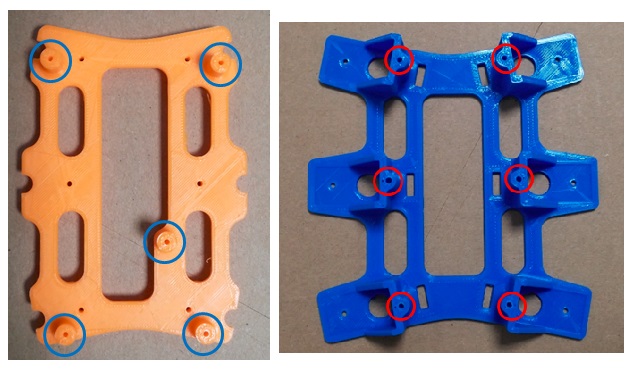
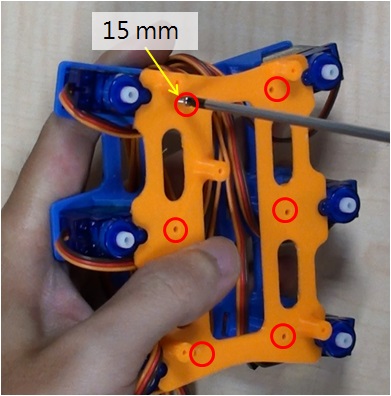
body_topパーツをかぶせ、並びに6個の長さ15 mmのボルトで、下図赤丸で示したようにbody_topに固定する:
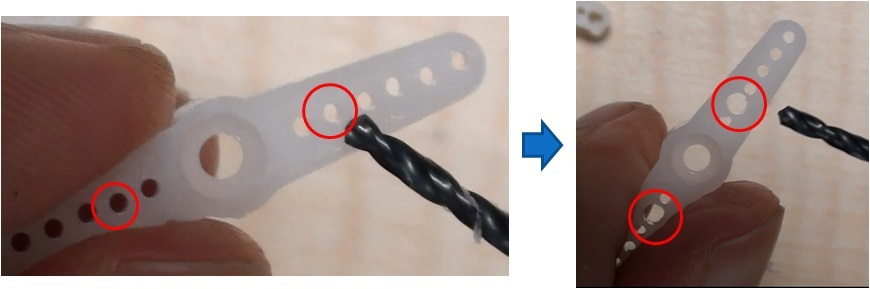
ドリルで一字の形をしたパーツに対し穴を開ける(中心数えて二つ目の穴、下図参照)。合計で6つの穴を開けること:
先程提供した秒帰零プログラムは6個のサーバーをそれぞれ中点とし、並びに一字型のアクセサリートレイを下図の通りサーバーの出力軸へかぶせること:
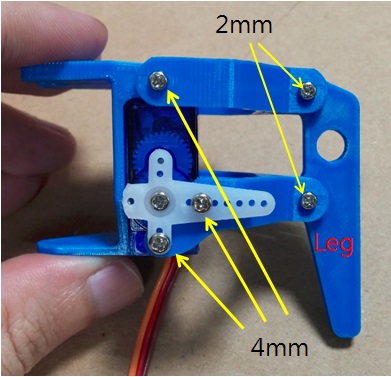
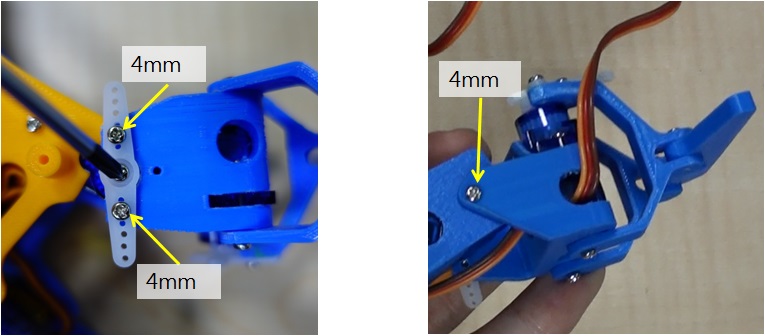
3個の2mm x 4mmボルトを用いて脚部に固定し(2個でアクセサリートレイを固定し、もう1個でlinker とbody_bottomを固定する)、並びにセルフタッピングネジでサーバーの一字型アクセサリートレイをねじ止めし、ニッパーでアクセサリートレイの凸部分を切除し、見た目をよくすること:
6本の脚部を全部、下図の通りねじ止めすること:
86Duino Zero開発ボード取り付け
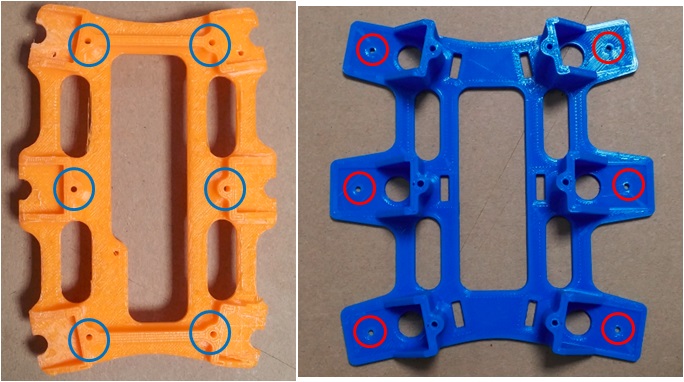
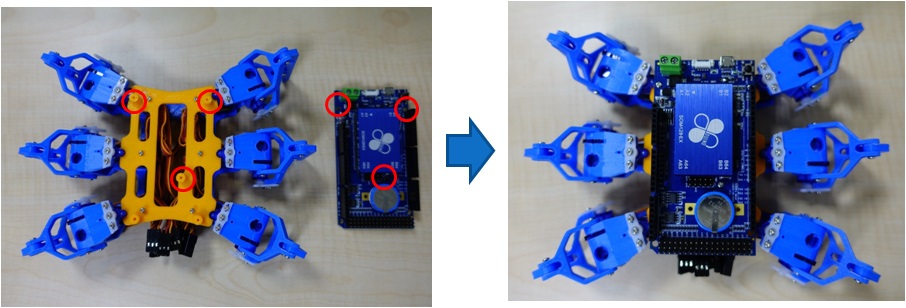
下図赤丸の所に、3個の2mm x 4mmボルトで86DuinoZeroをbody_top上に固定すること:
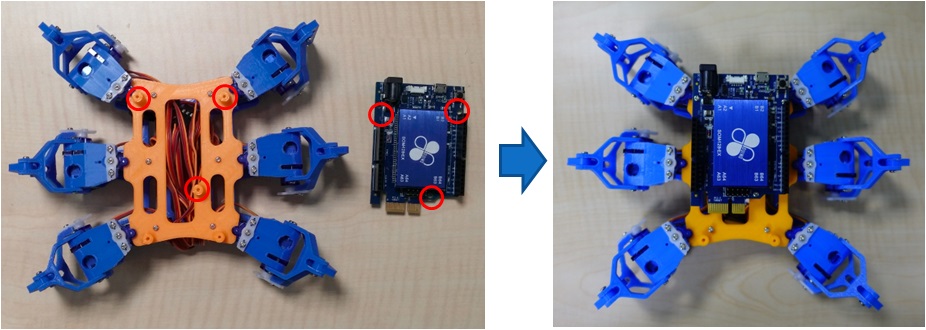
2個の2mm x 4mmボルトで拡張版を固定すること:
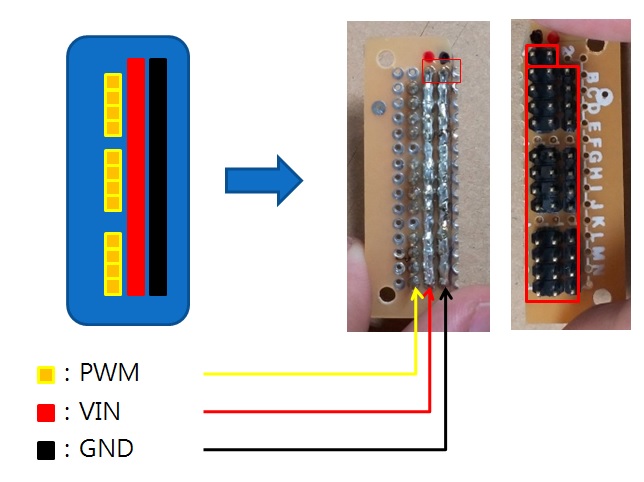
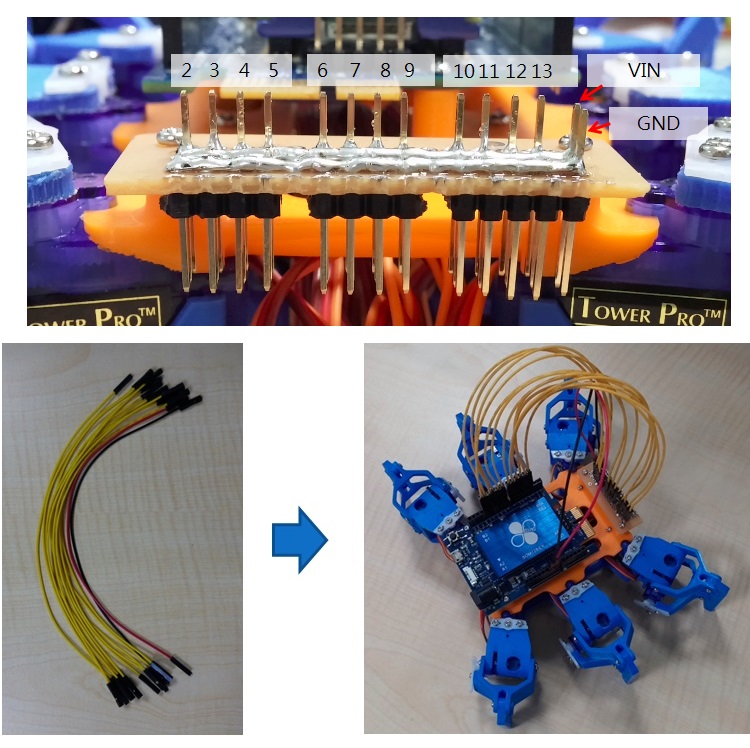
86スパイダーサーバーコードと拡張版上のピンの対応は下図の通り:
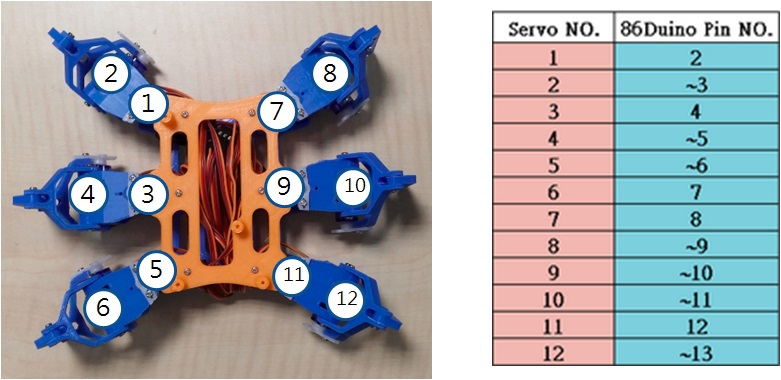
12本の黄色(PWM)、1本の赤(VIN)、1本の黒(GND)のケーブルを86DuinoZeroに繋ぐこと:
86Duino One開発ボードへ取り付け
赤丸の所に対応して、3個の2mm x 4mmボルトを使用して86DuinoOneをパーツ上に固定すること:
86スパイダーサーバーコードと86DuinoOne上のピンを下のように対応させること:
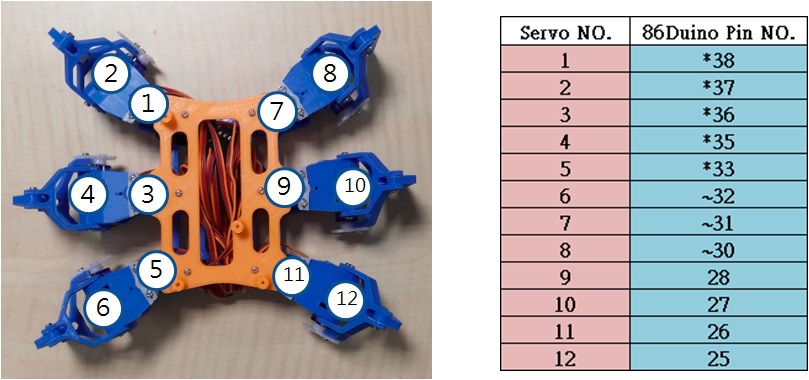
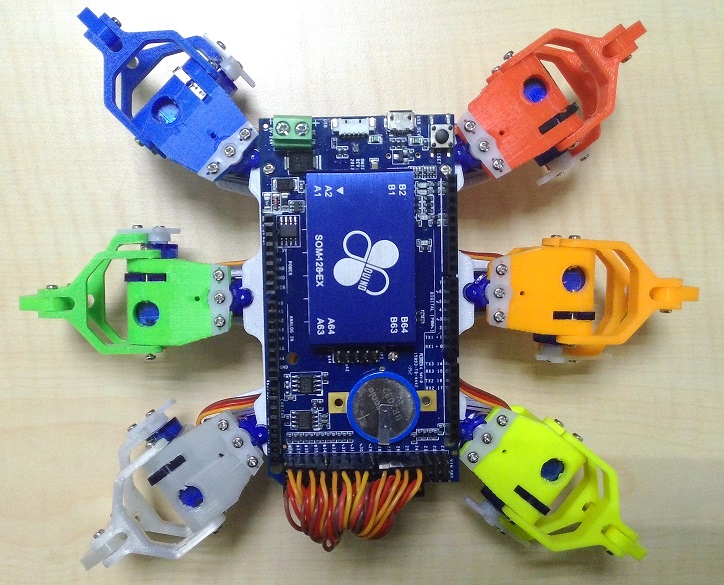
全てのサーバーを86DuinoOne連接すること:
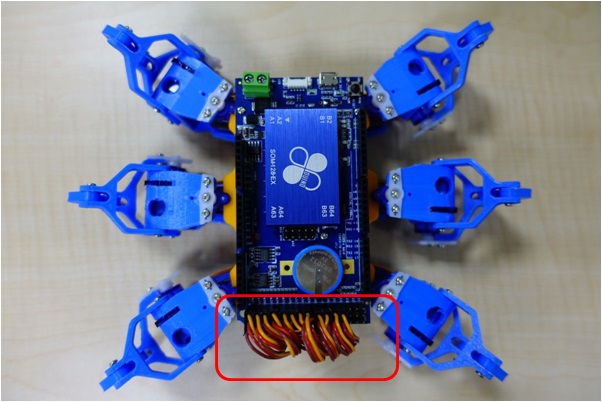
最後に私たちは露出している線を整え、86スパイダーの外観をより美しいものとする。
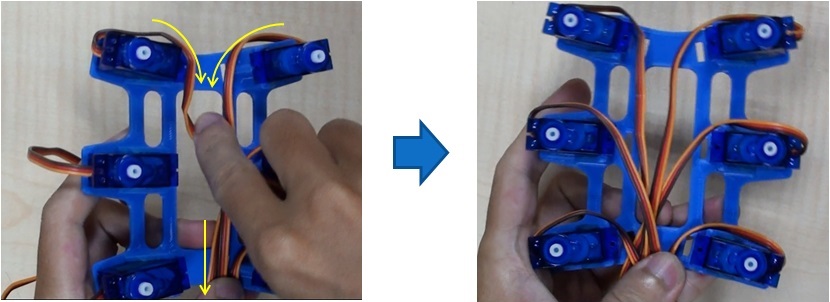
まず露出しているサーバーの線を86スパイダーの体内へと引っ張りいれて、サーバーの線を折って短くし結束バンドで両脇に固定すること:
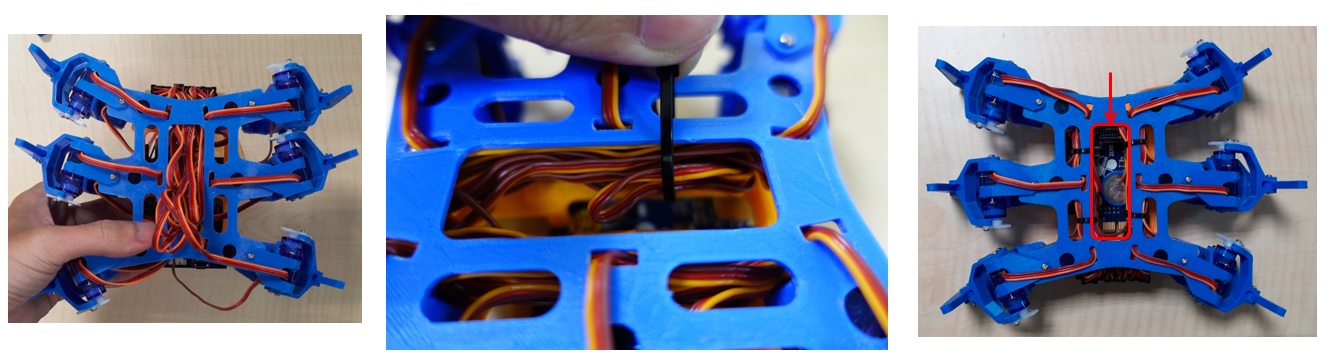
結束バンドで束ねて固定した後、できるだけ右赤枠の所にサーバー線がなるべく見えないようにすること。なぜなら、これは将来的にリチウム電池設置の場所となるからである。
動作コントロール
86ME Mk-IIが既に86スパイダーの応用プロジェクト用に設定されているため、貴方は C:\ProgramData\86ME\examples 内において 86Hexapod.rbm 歩行動作を見つけることができる。
プロジェクト起動後、毎台86スパイダーごとにそのoffset値を微調整する必要があることを忘れないでおくこと。そうすることで、サーバー上のわずかな誤差を修正することが可能である。
成果表示
関連資料
86Duino スパイダーロボット DIY 課程教材
The text of the 86Duino reference is licensed under a Creative Commons Attribution-ShareAlike 3.0 License. Code samples in the reference are released into the public domain.