computePPU_LeadScrew()
描述
在使用 config_PPU 设定 PPU(Pulse per Unit) 时,可使用协助计算函数来求得设定参数。
PPU(Pulse per Unit) 关系如下图:
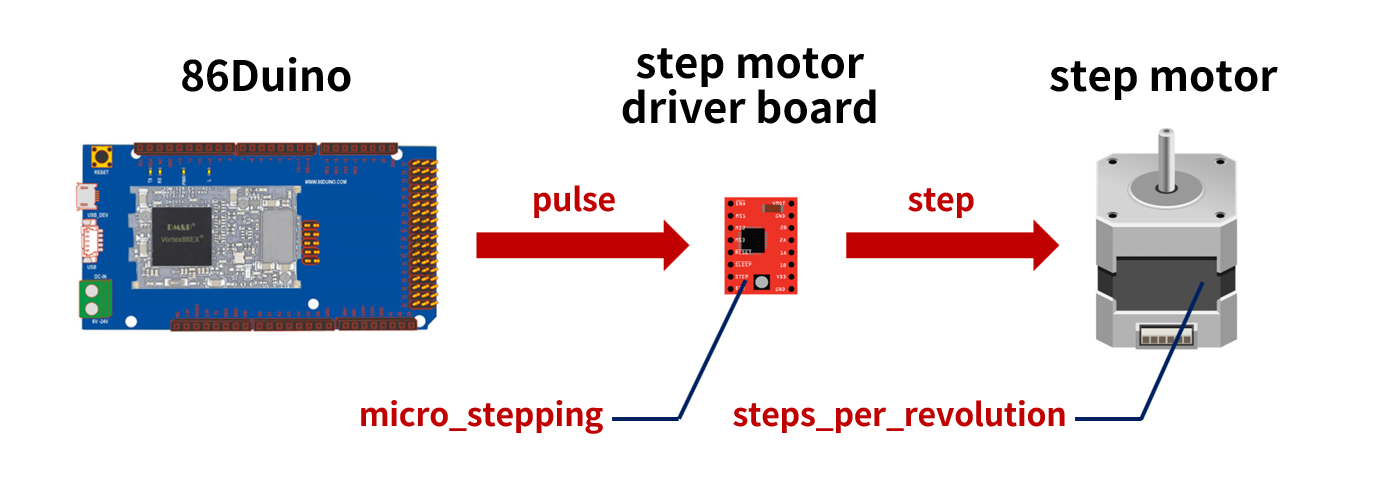
86Duino 发送 pulse 到步进马达驱动板,驱动板便会发送 step 使步进马达旋转。
micro_stepping:- 步进马达驱动板上的参数,若要打出一个 step,需从 86Duino 接收到的 pulse 数。
steps_per_revolution: - 步进马达上的参数,若要转动一圈需从步进马达驱动板接收到的step数。
pulses_per_revolution 之计算公式为 steps_per_revolution * micro_stepping。
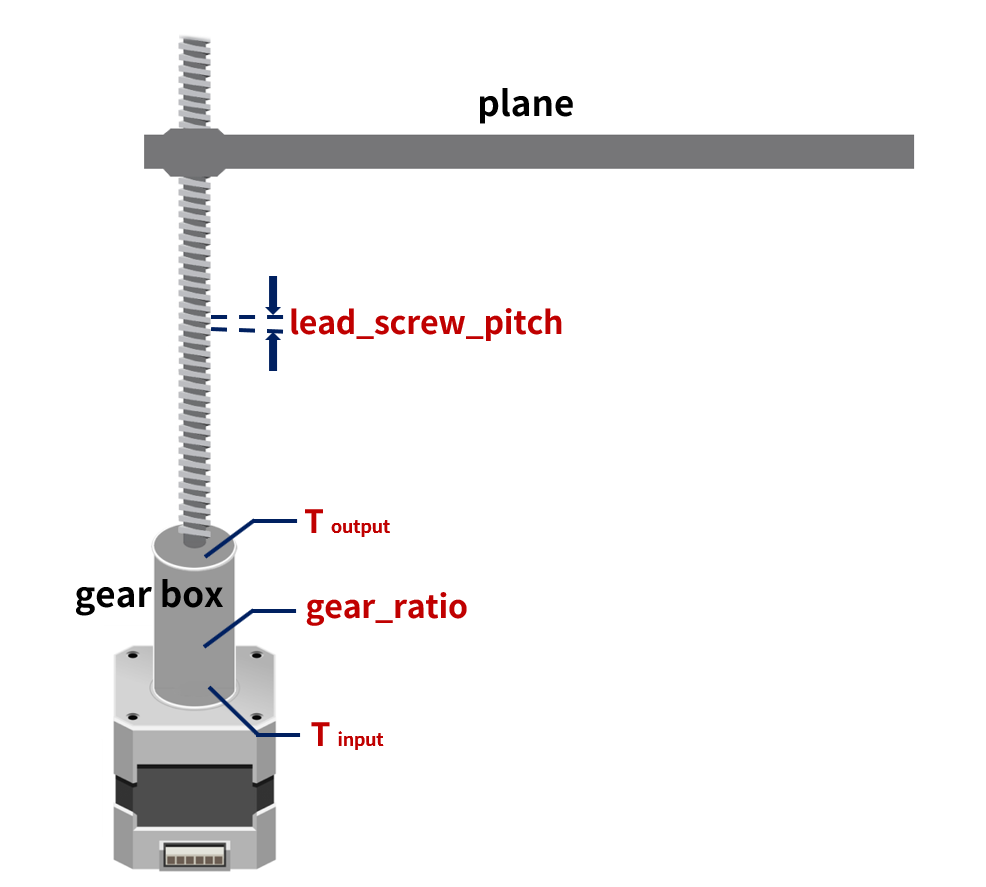
参数需要测量导螺杆牙距与齿轮箱齿轮比,如下图:
语法
machine.computePPU_LeadScrew(pulses_per_revolution, leadscrew_pitch, gear_ratio);
参数
machine:为 Machine物件。
pulses_per_revolution:让步进马达转一圈,86Duino需要打的pulse数。
leadscrew_pitch:导螺杆牙距。
gear_ratio:齿轮箱的齿轮比,gear_ratio 之值为输出齿轮齿数 / 输入齿轮齿数,即gear_ratio = Toutput / Tinput。
回傳
double: 回传计算完成后的 PPU(Pulse per Unit)。
See also
config_ppu()
computeppu_belt()
函式庫參考主頁面
86Duino参考的文本已在 Creative Commons Attribution-ShareAlike 3.0 License.下许可。引用中的代码样本已发布到公共领域。