プリントボットカニを作ろう!
プロジェクトの起源

このプロジェクトは、Scrap Six Legsプロジェクトから派生しました。「Scrap Six Legsによく似たPrintBot Crabプロジェクトがあるんですよ?」と上司は言いました。 「エンドロ博士のソルジャーC、このプリントボット・クラブ・プロジェクトは君のものだ!」そして、ソルジャーCがプロジェクトリーダーに任命されました。
機能説明
Thingiverseには、プリントボット・クラブという興味深いプロジェクトがあります。このプロジェクトには、GUIA_Printbot_Cangrejoのアセンブリファイルが含まれています。
これを実装するには、86Duino Enjoy と 86Duino Zero を使用します。さらに 86ME と組み合わせれば、コードを1行も書かずに PrintBot Crab をアニメーション化できます!
マテリアルの準備
— 3Dプリントパーツ — 86Duinoを使って部品を印刷する
まず、86Duino Enjoyを使ってPrintBot Crabの全パーツを印刷します。(86Duino Enjoyの使用中に問題が発生した場合は、こちらのチュートリアルを参照してください。)スライスソフトウェアを使用してGコードを作成する際、PrintBot Crabの2つのパーツが86Duino Enjoyの印刷範囲を超えていることに気付きました。その2つのパーツとは、以下の2つです。
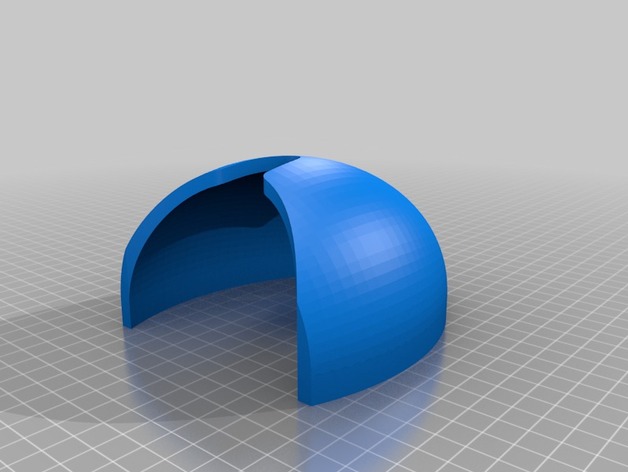
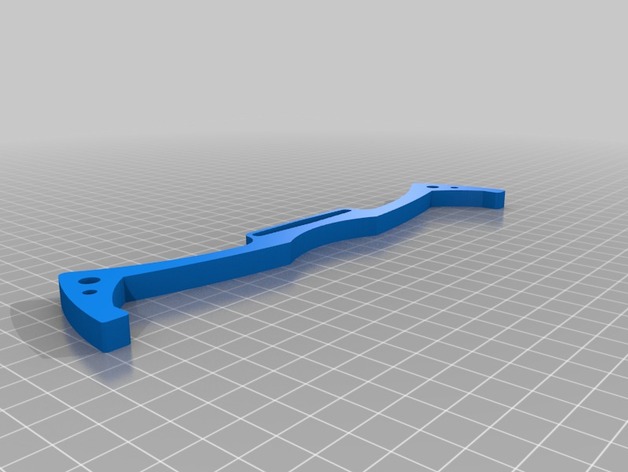
STLファイル編集ソフトを使って、印刷可能領域からはみ出した2つのパーツを2つに分割します。こうすることで、86Duino Enjoyの印刷可能領域内に収まります。必要な場合は、こちらからソフトウェアをダウンロードできます。
下の画像は、印刷したすべてのパーツです。印刷用に分割したパーツは、瞬間接着剤で接着されています:

プリントしたパーツに加えて、プリントボットクラブを組み立てるには他のパーツも用意する必要があります。ここで使用するパーツは、プリントボットクラブプロジェクトで使用したパーツと全く同じではありません。
— ネジ —

ここでは既存のネジとナットを使用しているため、仕様は原作者のものと異なります。原作者のネジの仕様は、GUIA_Printbot_Cangrejo のアセンブリファイルに記載されています。
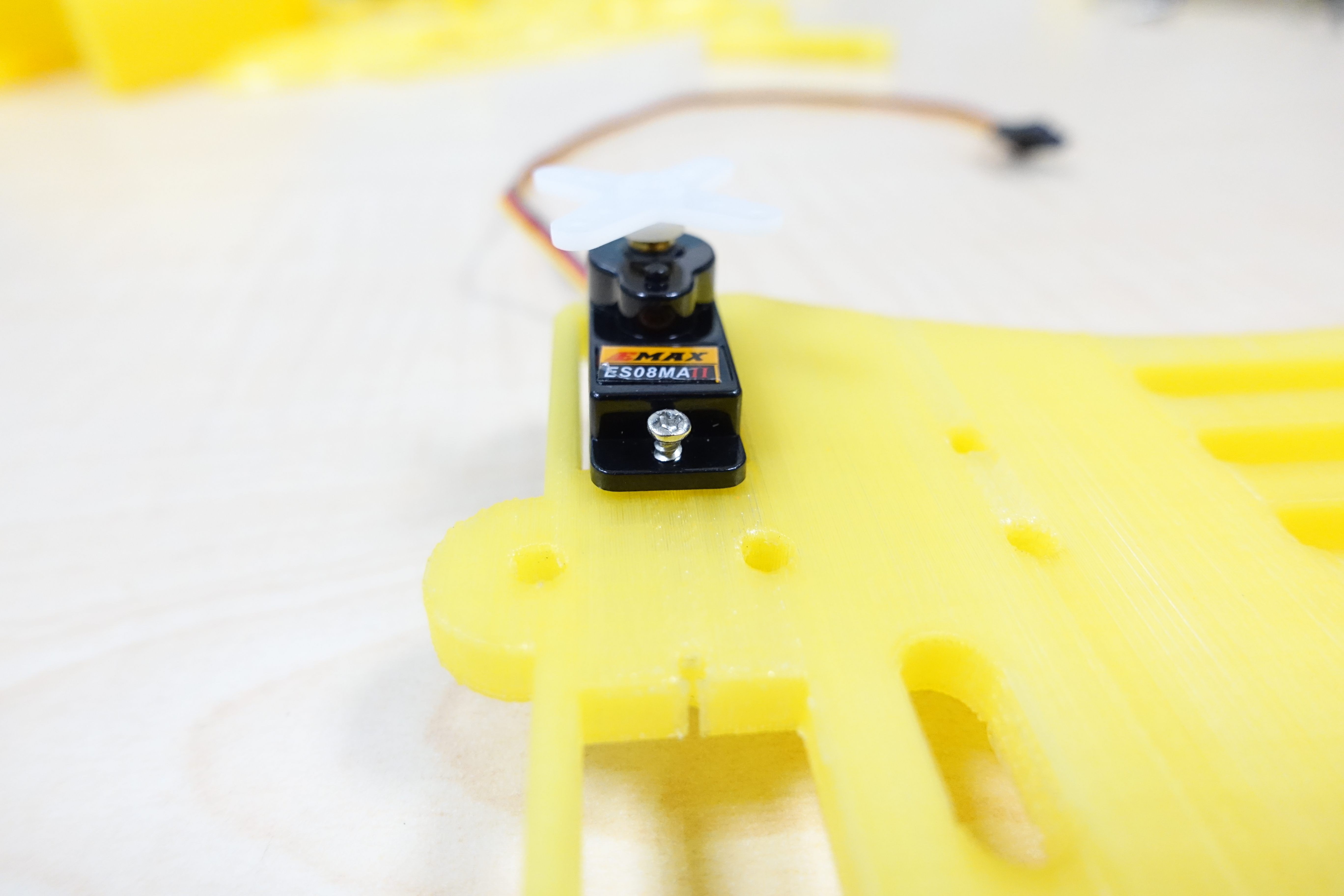
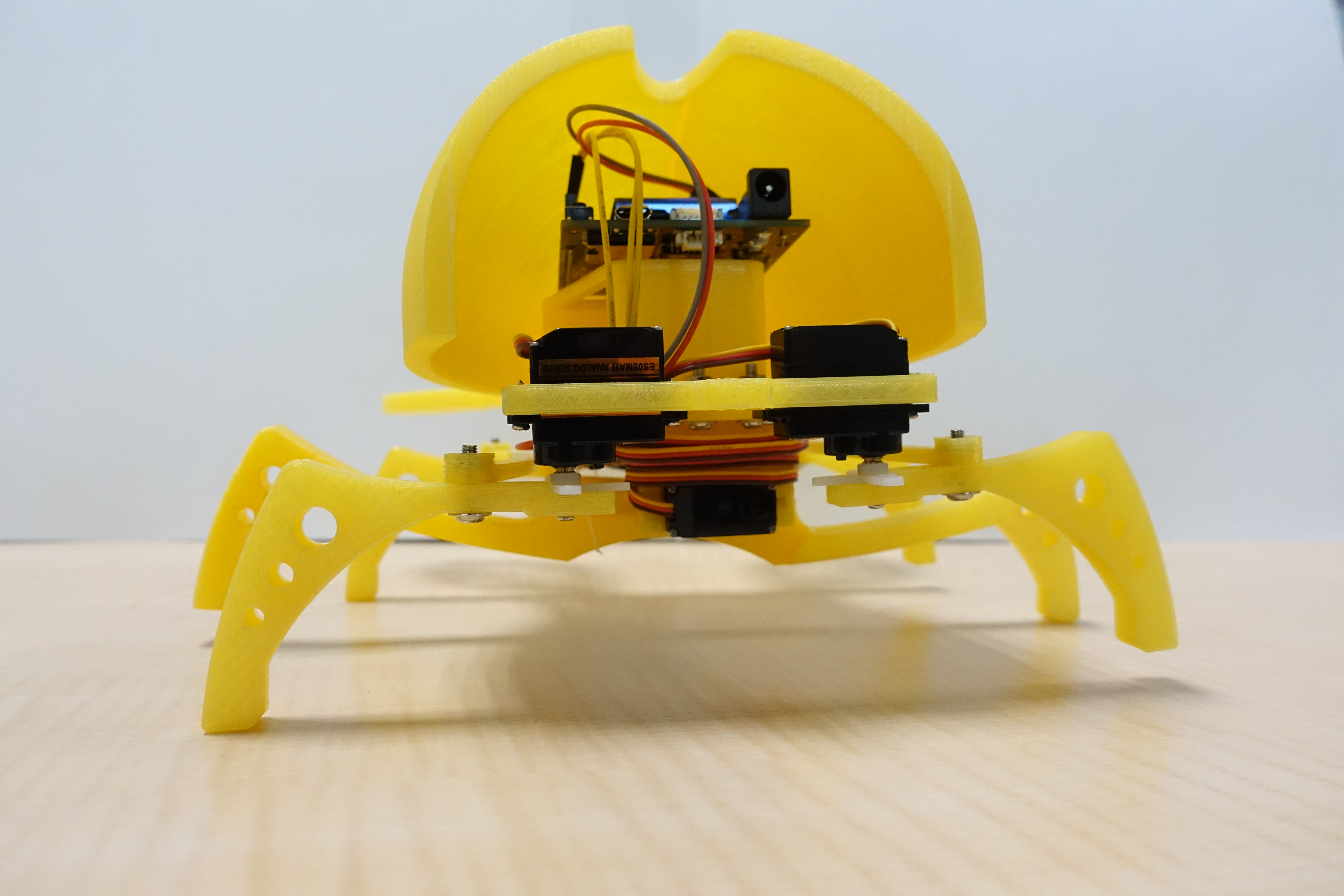
—Servo—

サーボにはEMAX ES08MAIIが使用されており、4.8V~6Vの電圧で動作します。
— バッテリー —

バッテリーにはリチウムバッテリーをお選びください。サーボの動作電圧を超えて充電するとサーボが損傷する可能性があるため、ご注意ください。
— ケーブルと拡張ボード —

PWM 信号と電源を接続するためのデュポン ワイヤをいくつか用意し、サーボへの接続を容易にするためのアダプタ ボードを作成します。
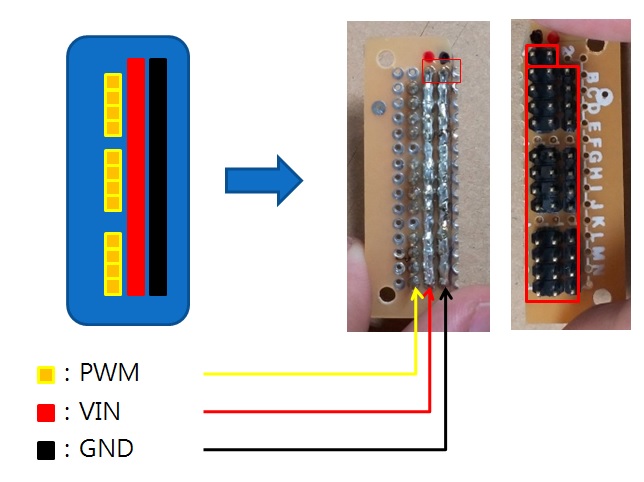
拡張ボードの上部2つのピンは、リチウム電池への接続に使用します。プラスとマイナスの電源ピンは、拡張ボードの背面にあります。ピンははんだ付けで一列に接続されています。電源に加えて、上部にはPWMピンを接続するための列がもう1つあります。電源ははんだ付けでまとめて接続されていますが、PWMピンはそれぞれ独立しています。この拡張ボードでは、サーボケーブルを拡張ボードに差し込むだけでサーボを接続できます。
ハードウェアのセットアップ
ここではすべての組み立て手順を説明するのではなく、特に注意が必要な箇所や、元の著者の手順と異なる箇所のみを重点的に説明します。より詳細な組み立てチュートリアルについては、GUIA_Printbot_Cangrejoを参照してください。
サーボの取り付け
サーボをPrintBot Crabに固定するためのネジは、サーボアクセサリキットに含まれています。
ターンテーブルをサーボに取り付ける前に、サーボをゼロリセットする必要があります。ゼロリセットとは、サーボを可動範囲のちょうど中心に回転させることを意味します。 Servo86 ライブラリを使用して、サーボをゼロにリセットします。次のコード例を参照してください。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
|
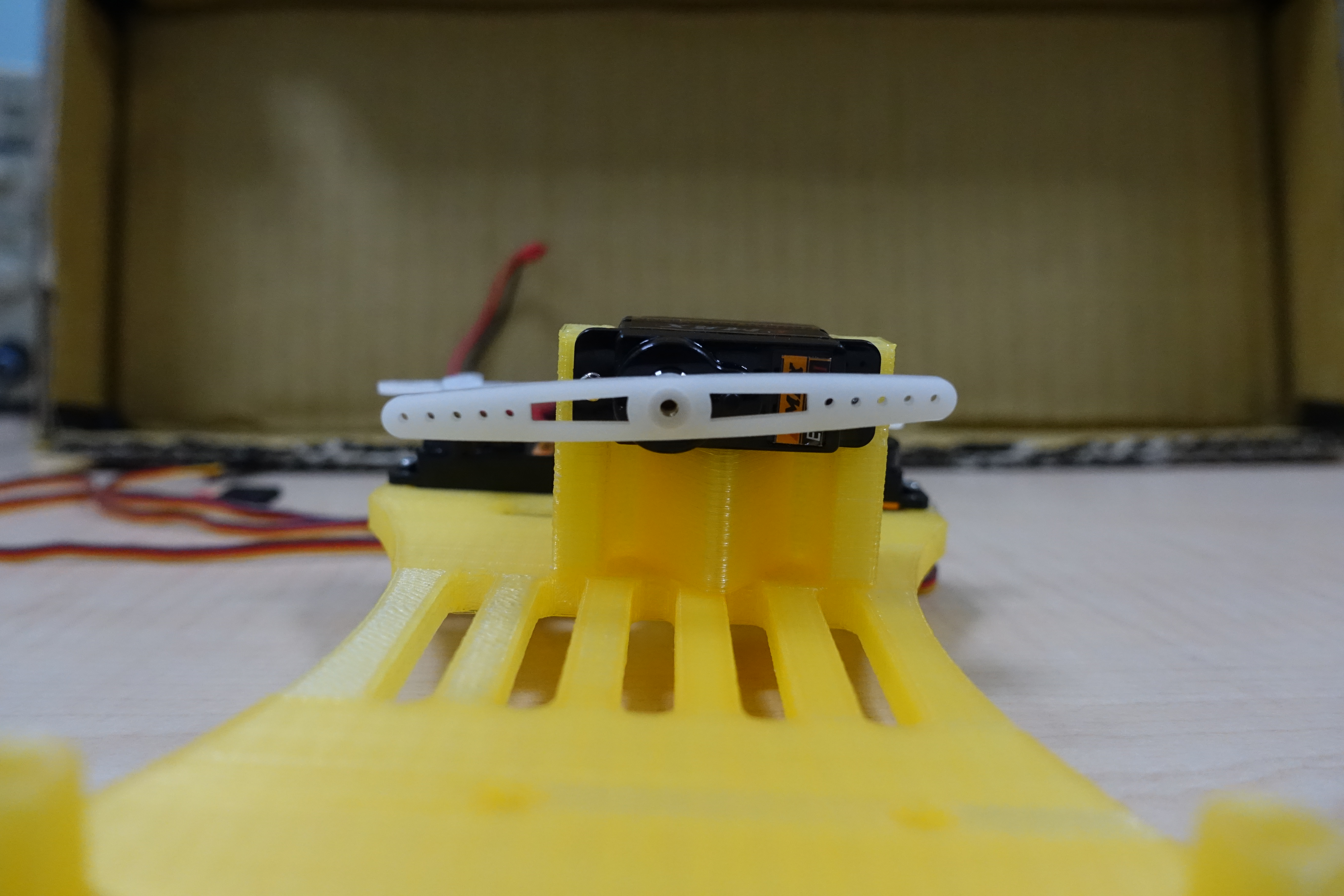
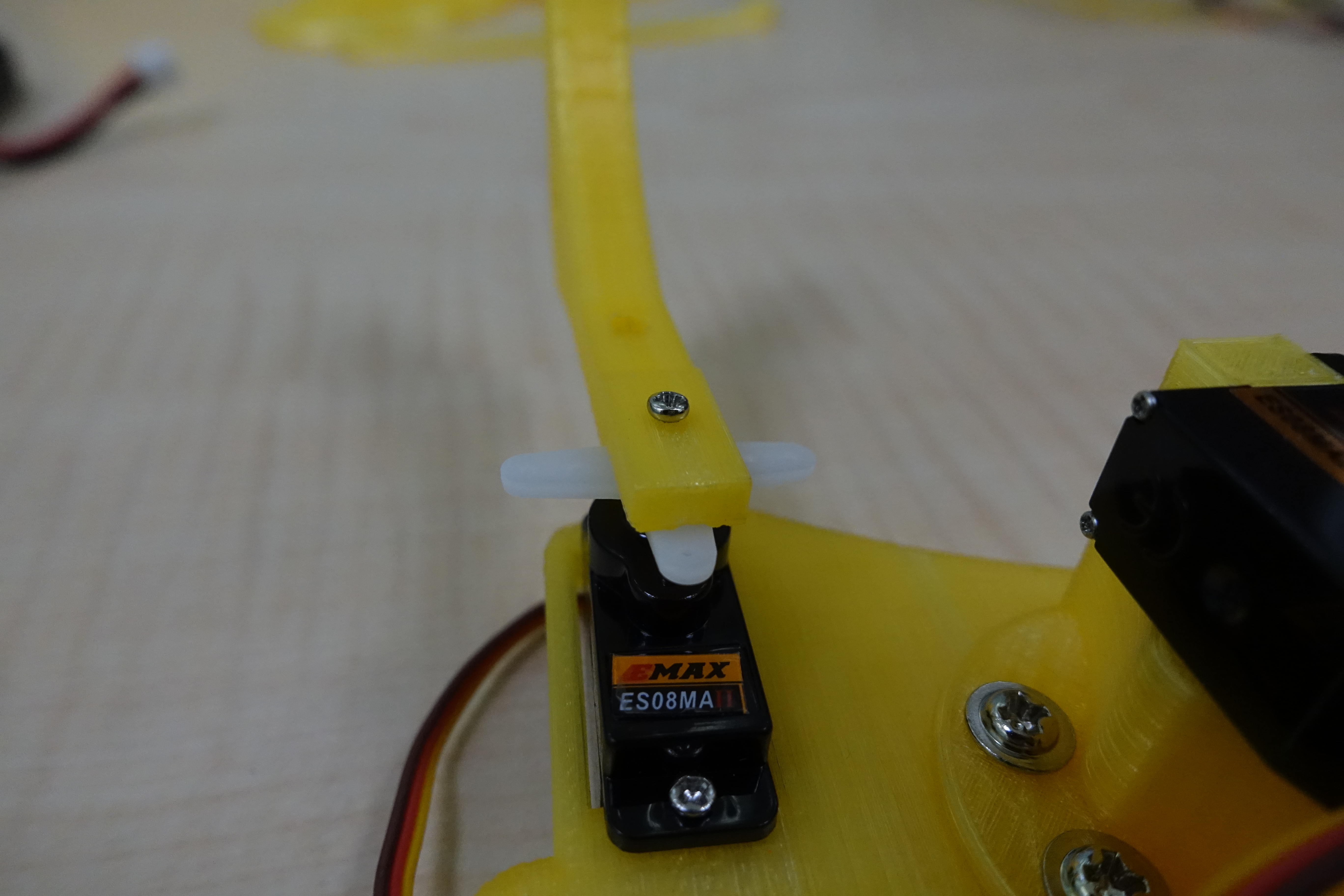
サーボのゼロ調整が完了したら、ターンテーブルを取り付けます。ターンテーブルがぴったりとフィットしない場合もありますが、これは後でアクションを編集する際に修正できるので問題ありません。
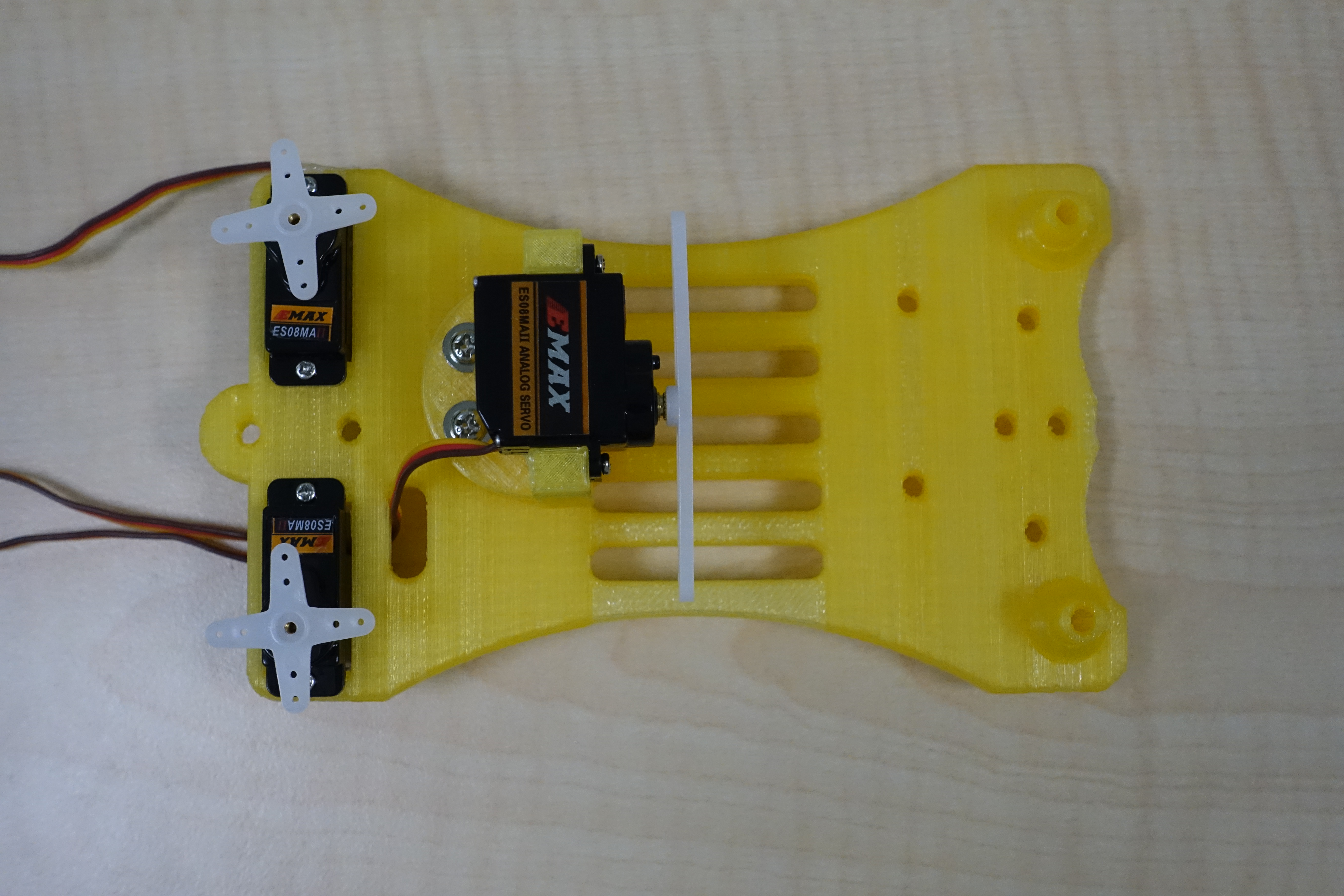
3つのターンテーブルをすべて取り付けると、以下の画像のようになります。
PrintBot Crabの印刷物をサーボターンテーブルに固定するためのネジは、サーボのアクセサリキットに含まれています。
拡張ボードの接続
サーボと86Duino ZeroをPrintBot Crabに固定したら、86Duino Zero、拡張ボード、サーボを接続します。拡張ボードを接続した後の様子を見てみましょう。
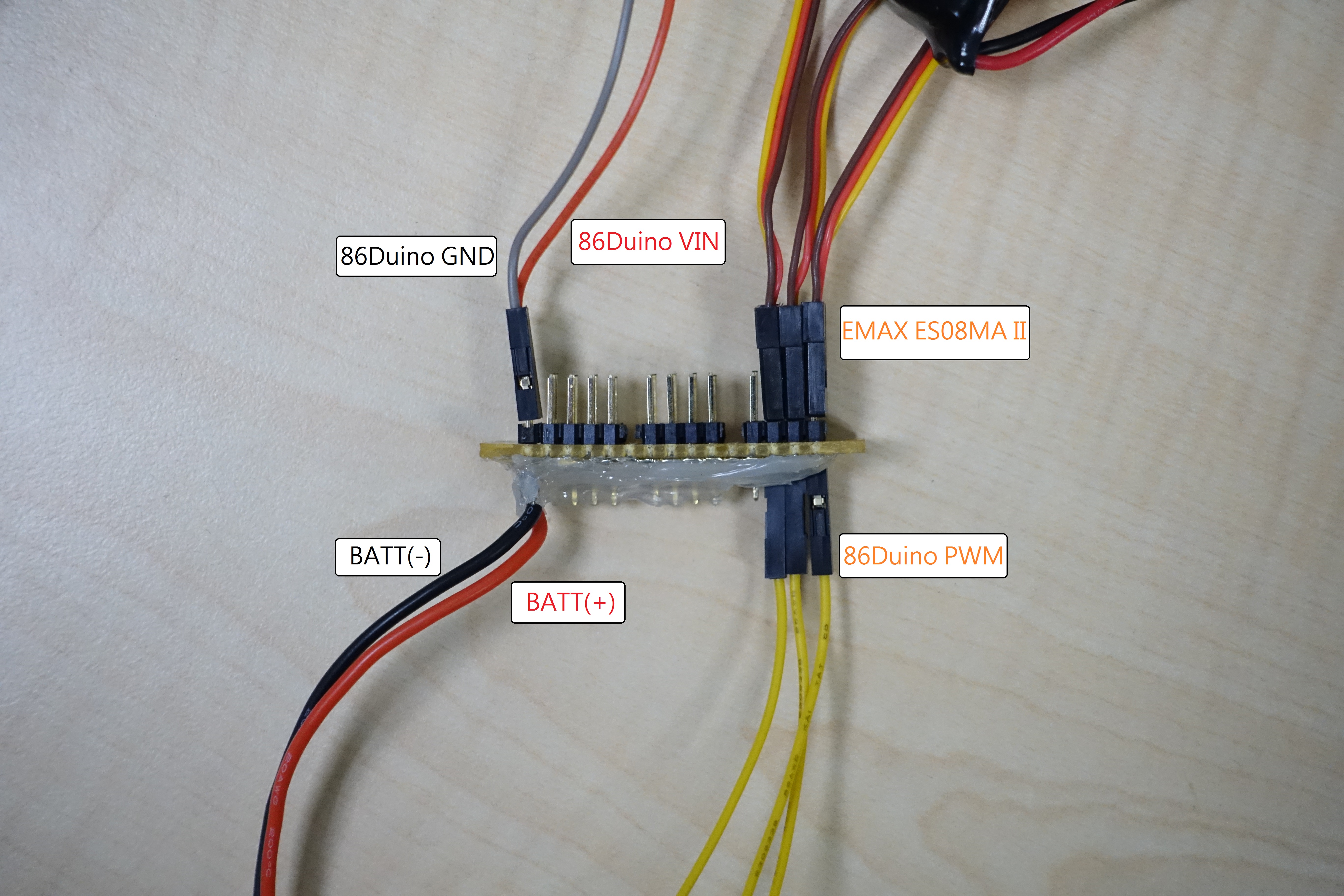
上の画像でマークされている86Duino PWMワイヤを、86Duino ZeroのPWMピンに接続する必要があります。下の画像は完成した86Duino Zeroです。
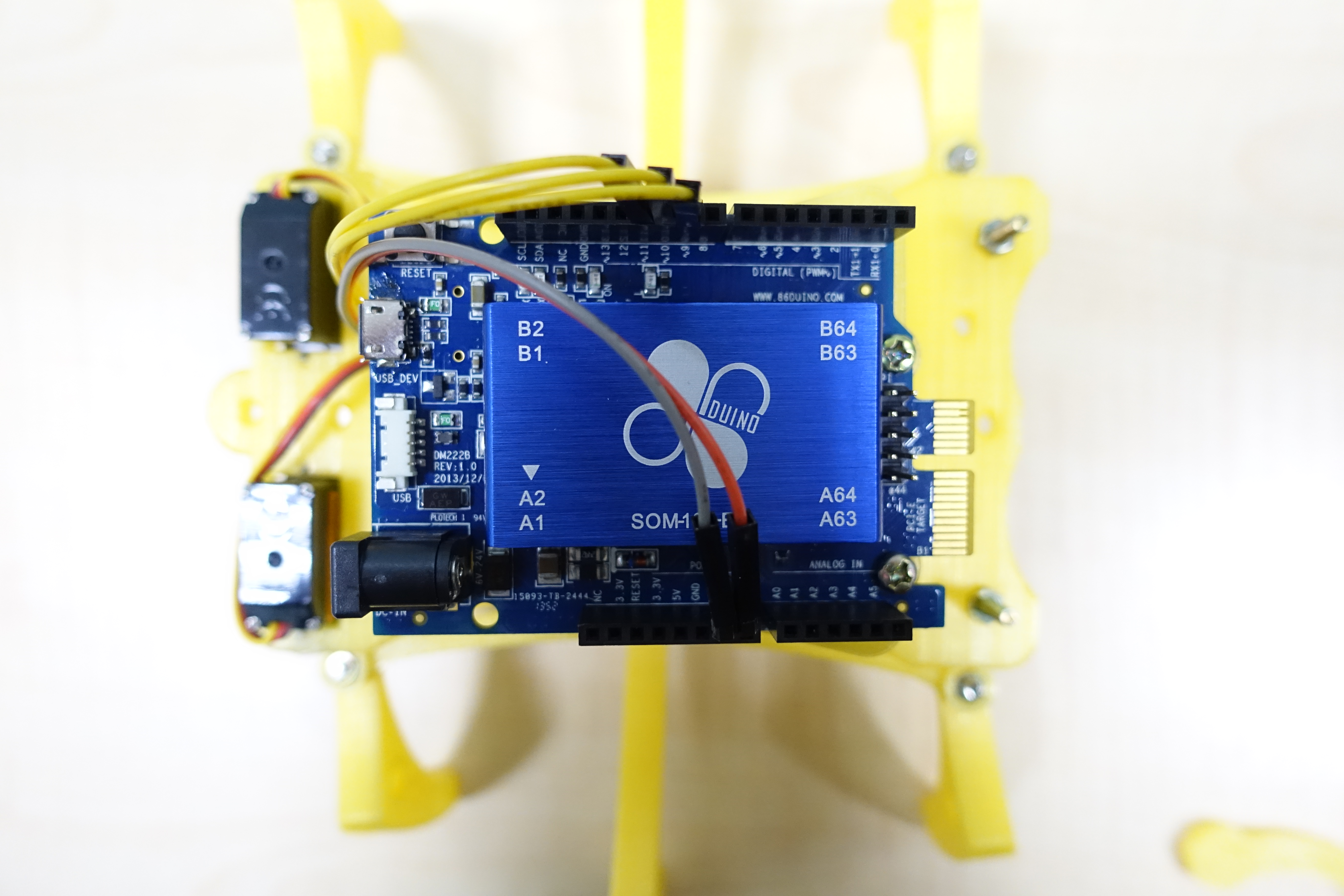
PWMピンは任意のデジタルピンから選択できます。ここでは9、10、11番ピンを選択します。
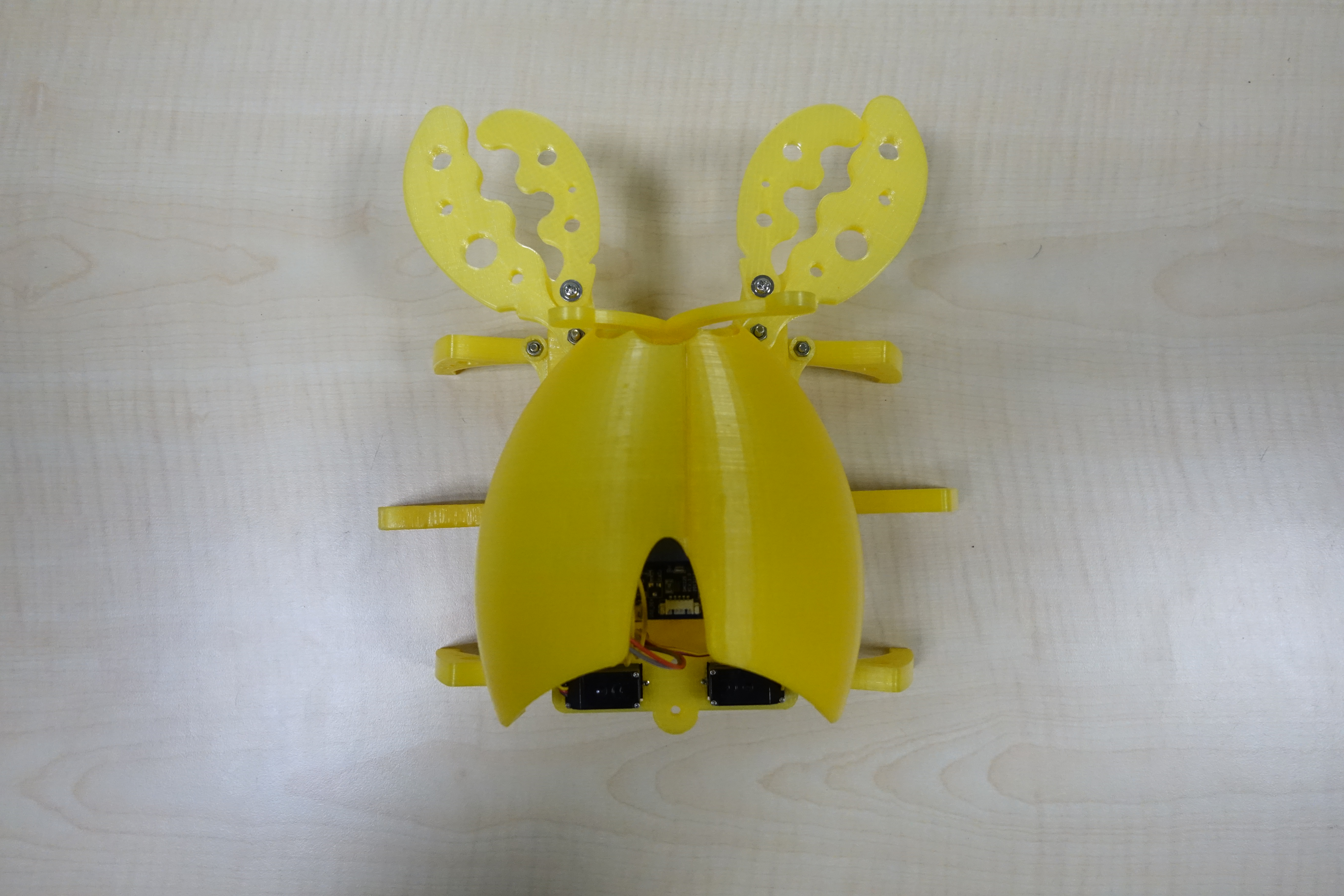
最後に、拡張ボードを固定します。PrintBot Crabの底面に取り付け、配線を適切に配置することで、すっきりとした外観を実現できます。
歩行の説明
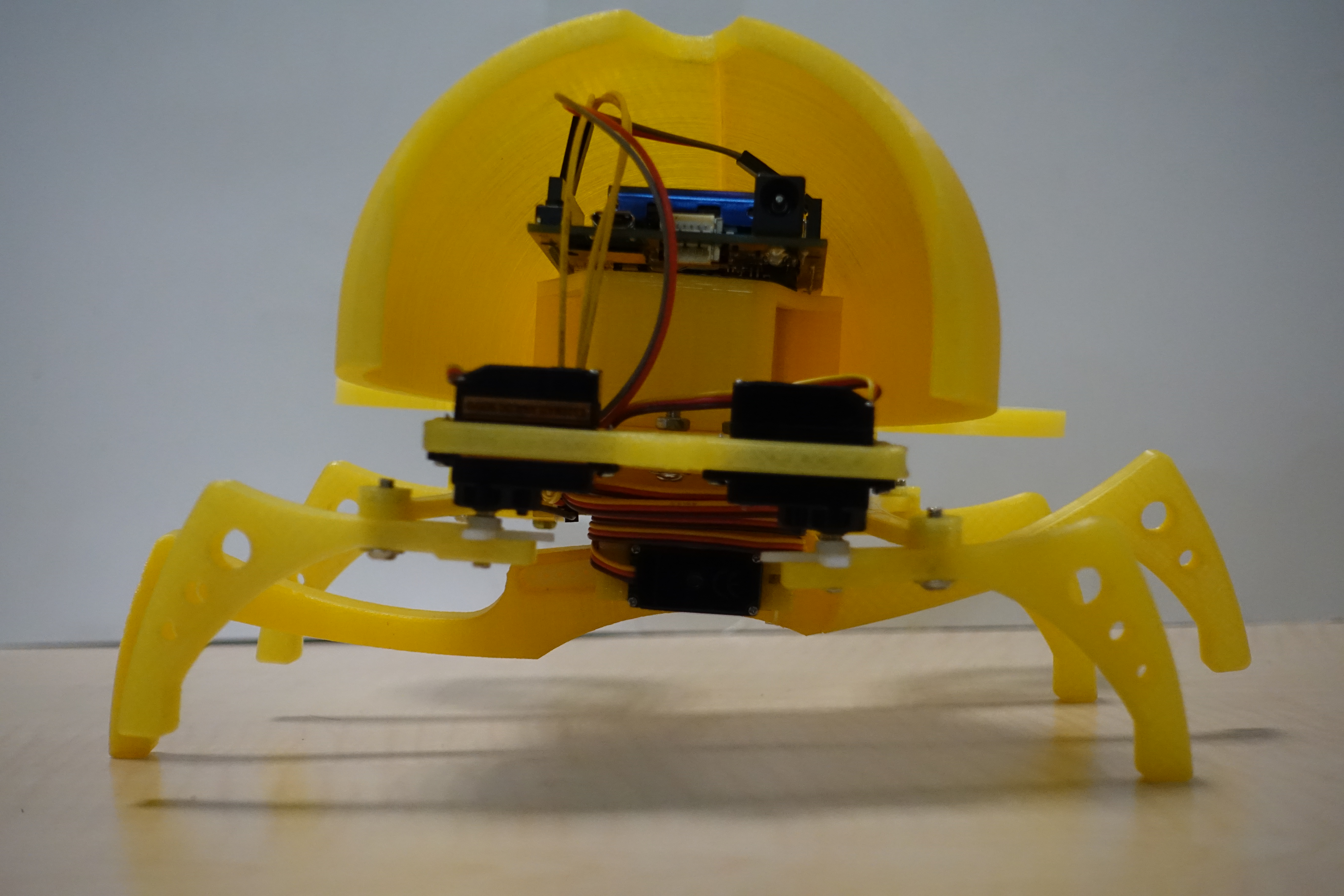
PrintBot Crabを組み立てたら、もちろんアニメーションを付ける必要があります。しかし、動きを編集する前に、まずは動き方を学びましょう。
PrintBot Crabは6本の脚を持っていますが、実際には3つのサーボしか使用していません。右前脚と右後脚は1つのサーボ、左前脚と左後脚は1つのサーボ、中央の右脚と左脚は1つのサーボで制御されます。6本の脚を制御するには、これら3つのサーボを制御する必要があります。説明を簡単にするために、6本の脚を3つのグループに分けます。右前脚と右後脚を「右脚」、左前脚と左後脚を「左脚」、中央の右脚と左脚を「中脚」と呼びます。次に、PrintBot Crab がどのように動くかを段階的に説明します。
1. ゼロイン:PrintBot Crab の脚をスタート位置に戻します。
2. 右側を持ち上げる:中央の脚を下向きに右に回転させ、体の右側を支えます。
3. 右足を前に、左足を後ろに動かします。

4.左リフト:中足を左下方に回転させ、体の左側を支えます。
5. 右足を後ろに、左足を前に:右足を後ろに、左足を前に動かします。
あとは2->3->4->5->2->3->…を繰り返すだけで、PrintBot Crabは振り返らずに前進し続けます!
モーション編集
PrintBot Crabの動きが分かったので、86MEを使ってモーションを編集し、生き生きと動かしてみましょう!
このセクションでは、このプロジェクトで使用した設定について説明します。これらを参考に、必要に応じて調整してください。86MEの使用中に問題が発生した場合は、86ME ユーザーズガイドを参照してください。
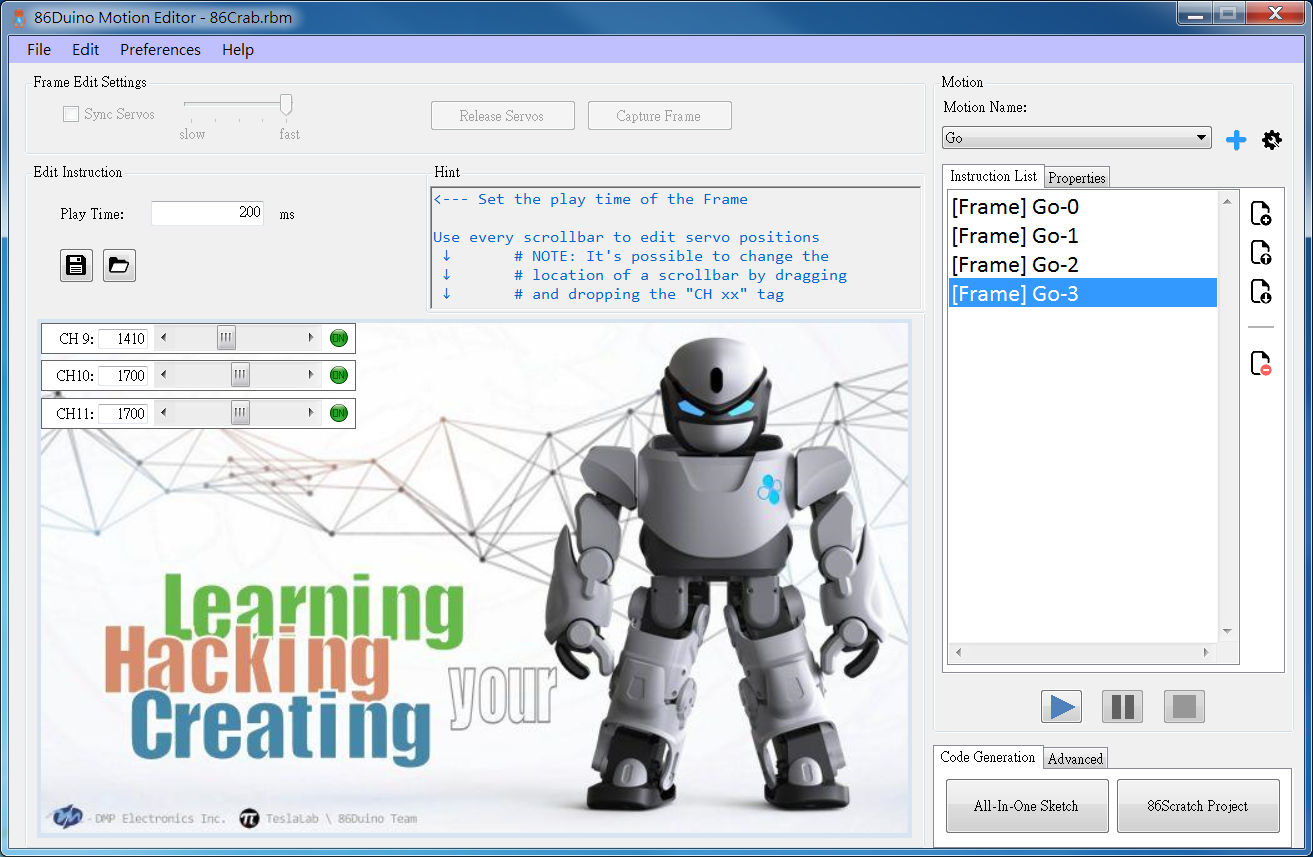
PrintBot Crabを前進させるには、モーションを作成する必要があります。このモーションは、前のセクションで説明した手順2、3、4、5に対応する4つのフレームで構成されます。このモーションを繰り返すことで、PrintBot Crabは前進します。
1. 右側面を上げます。
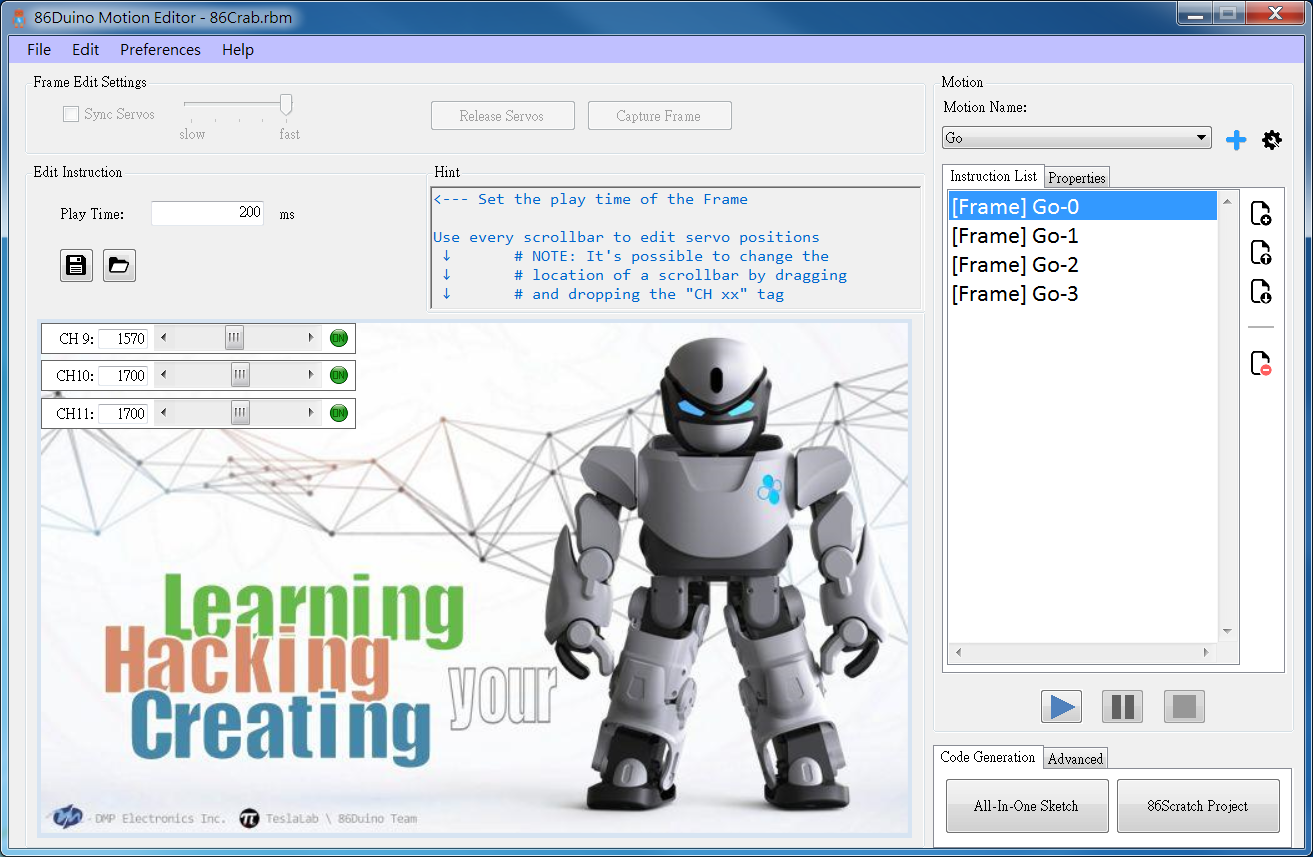
2. 右前進、左後退。
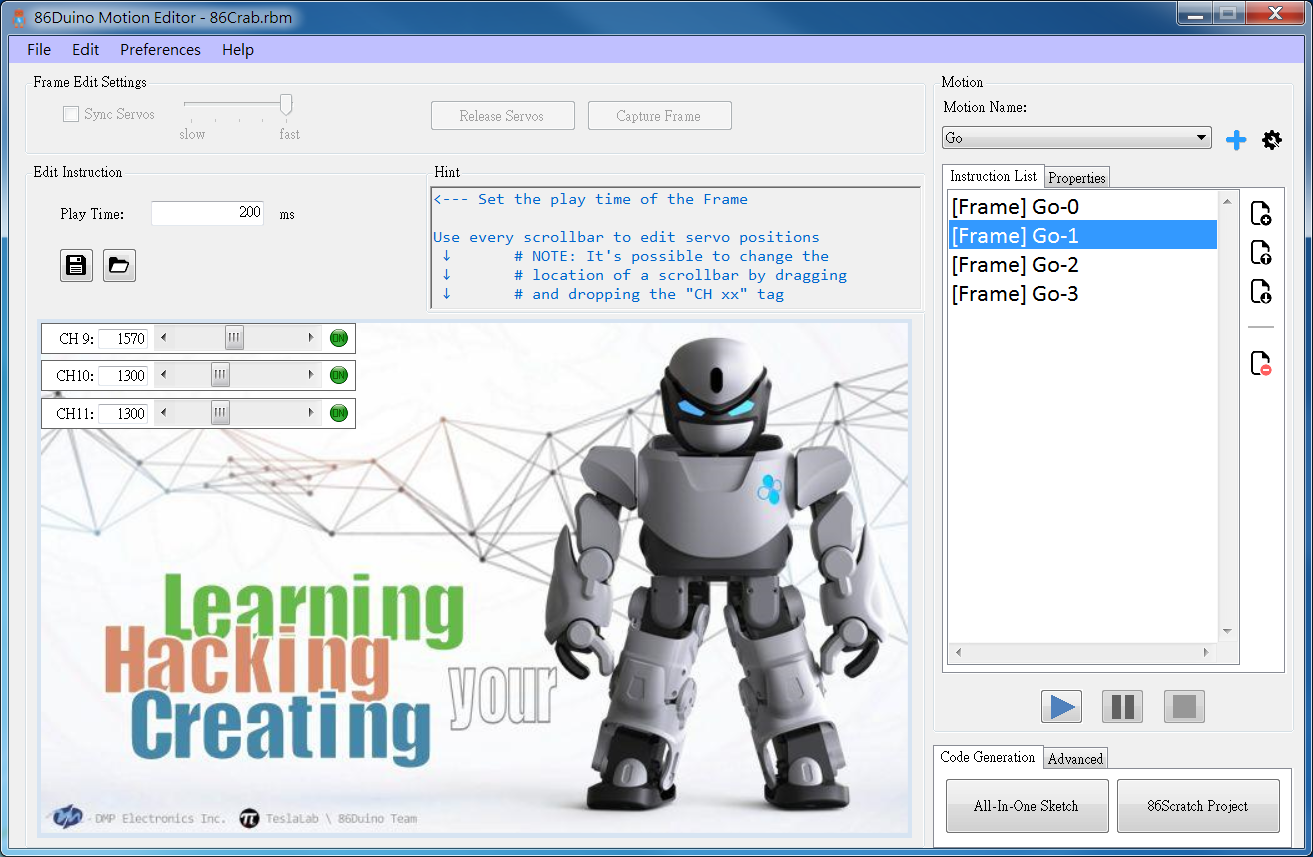
3. 左邊抬高。
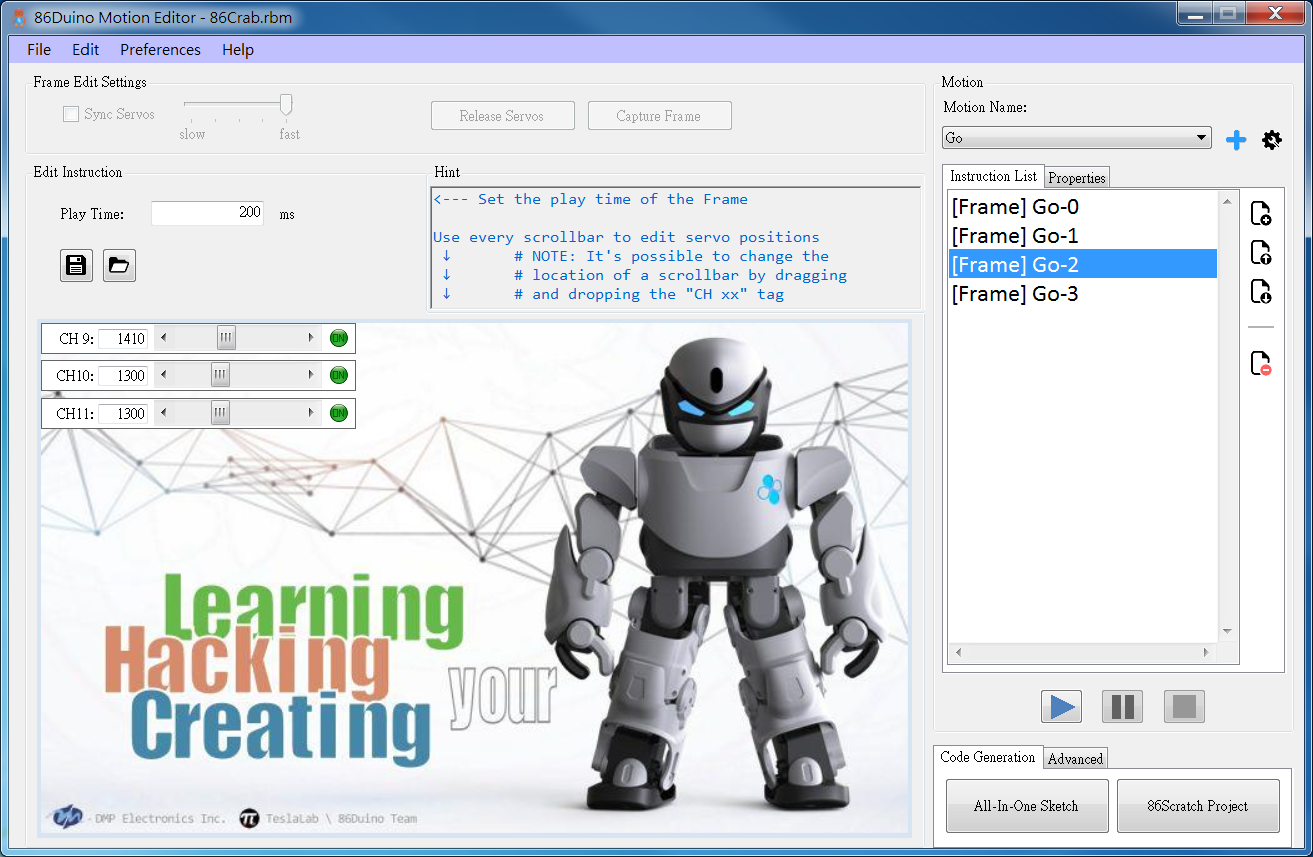
4. 右へ後、左へ前。
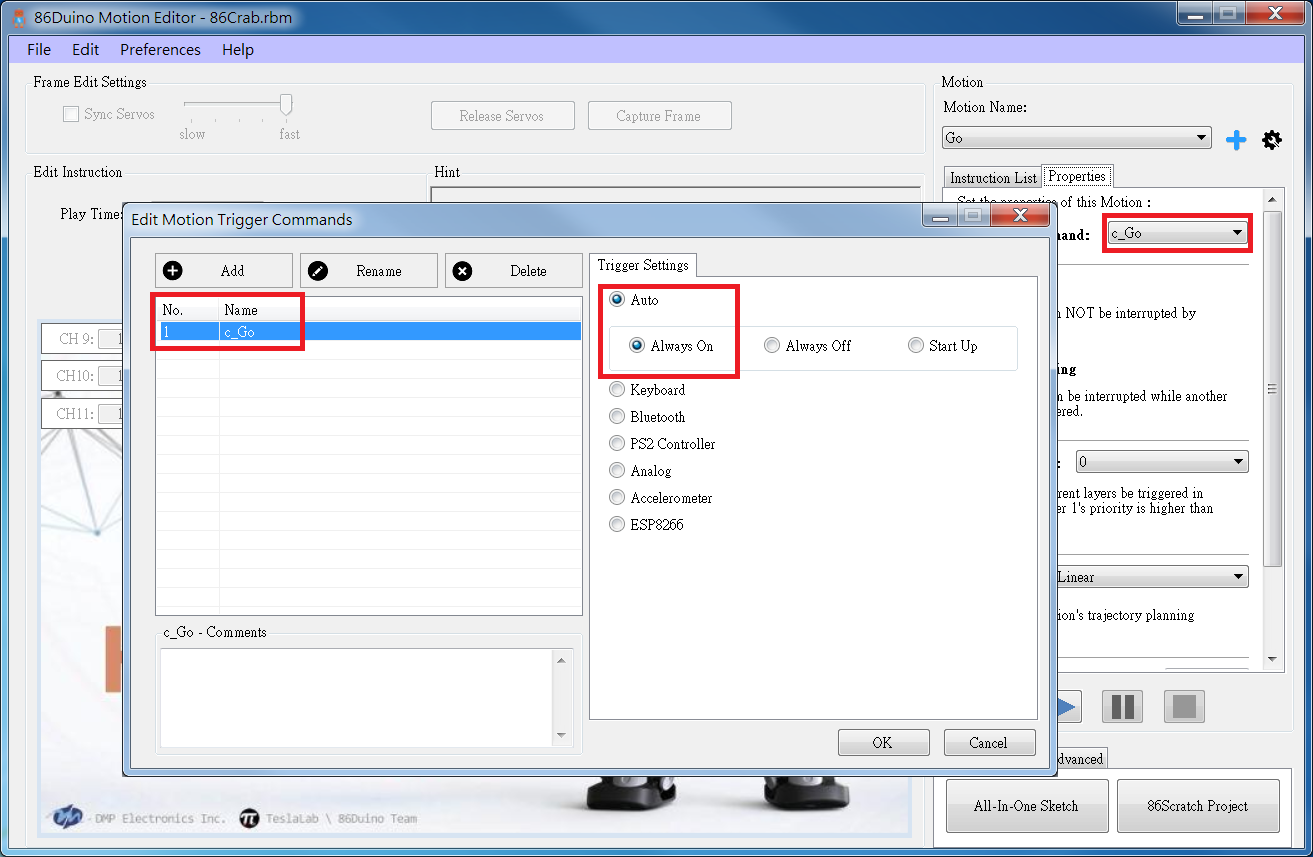
5 設定すると、トリガーコマンドスイッチが常時オンに設定されます。
デザイナー、オールインワンスケッチ、アプリケーション 86Duino IDE アプリケーションフォーム 86Duino Zero、新規スケッチ、PrintBot Crab ハングアウト!
多少異なるバージョンである必要はありません 86ME檔案、雪の結晶の一つです。

ストリングス
— デモミュージック —
ストリングス
[1] 取得元 Github
[2] ウェブサイト STL アップデート
[3] 86ME 配布システム
[4] DIY ガウンをご覧いただきありがとうございます: