computePPU_Belt()
説明する
config_ppuを使用してPPU(ユニットあたりのパルス)を設定する場合、アシスト計算関数を使用して設定パラメーターを取得できます。
PPU(単位あたりのパルス)関係は次のとおりです。
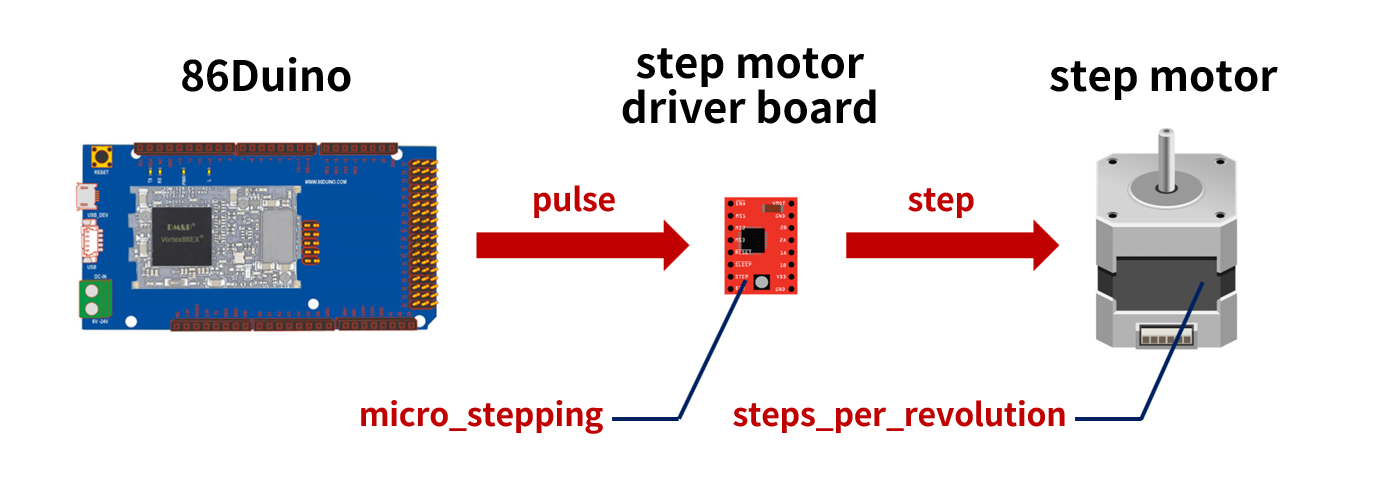
86DuinoはPulseをStepper Motor Drive Boardに送信すると、ドライブボードがステッパーモーターを回転させるためのステップを送信します。
micro_stepping:
– ステッピングモータードライバボードのパラメータ。ステップを生成するには、86Duinoから受信したパルス数が必要です。
steps_per_revolution:
– ステッピングモーターのパラメータ。ステッピングモータードライバーボードから受信する、1回転あたりのステップ数。
pulses_per_revolution の計算式は、steps_per_revolution * micro_stepping です。
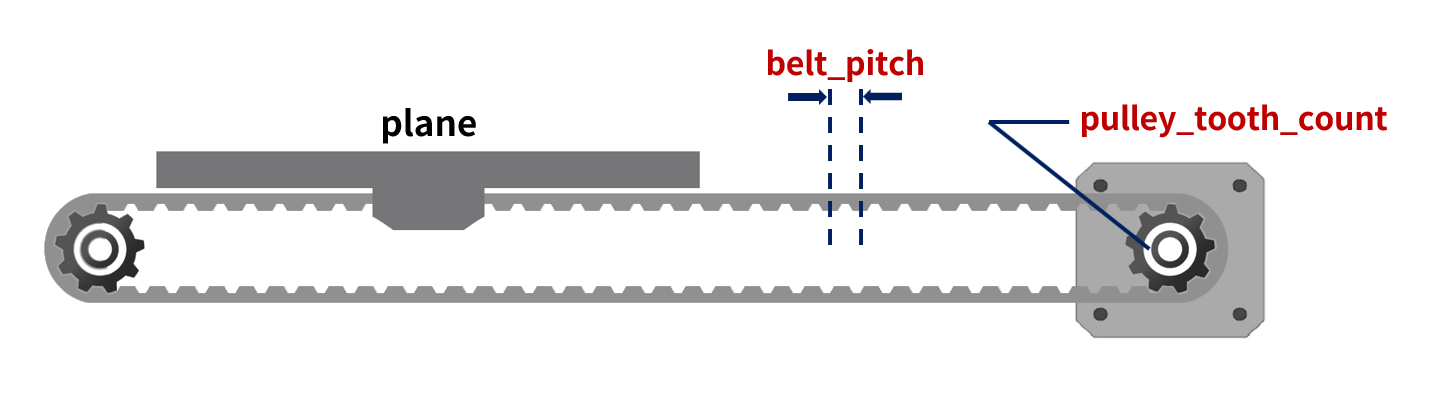
これらのパラメータは、ベルトピッチとギアの歯数を測定するために必要です。以下を参照してください。
文法
machine.computePPU_Belt(pulses_per_revolution, belt_pitch, pulley_tooth_count);
パラメーター
machine:Machineのオブジェクトです。 。
pulses_per_revolution:ステッピングモーターを作成して回転させると、86duinoを再生する必要があるパルス番号。 。
blet_pitch:ベルトの歯の距離、ユニットはミリメートルです。 。
pulley_tooth_count:ステッピングモーターと同期して回転するギアの歯の数。 。
戻る
double:バックロード計算が完了した後のPPU(ユニットあたりのパルス)。 。
参照してください
config_ppu()
computeppu_leadscrew()
86Duinoリファレンスのテキストは、 Creative Commons Attribution-ShareAlike 3.0 Licenseライセンスの下でライセンスされています。参照内のコードサンプルはパブリックドメインにリリースされます。