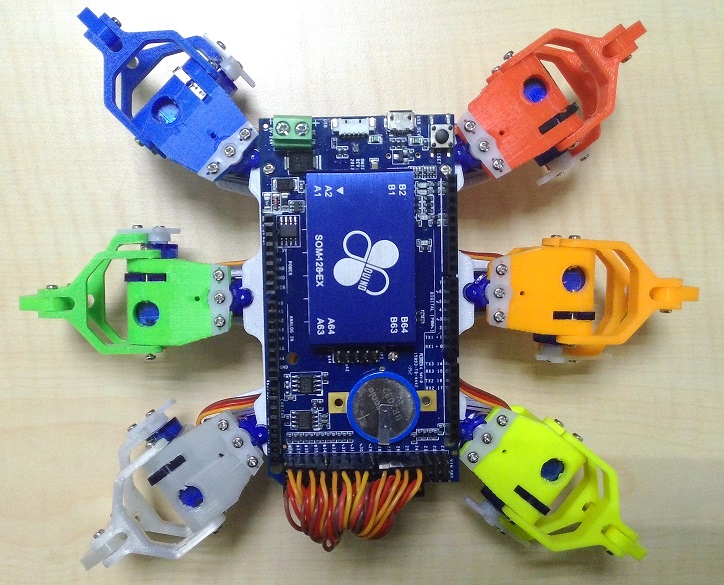
86小六足组装教学
专案起源
「嗯…经过史加纳专案后,好想再做一只可爱版的六足机器人啊…」 大概是之前史加纳专案成功地引起广泛关注和讨论,引发了老大内心的 Maker 魂,从那之后只要工作一有空档,老大便想着如何扩大机器人对教育市场的影响,现在的想法就是如何让人人都能自己组装一台…,突然, 「对了!我们有 3D 印表机印匠!!」 老大灵光乍现。 「恩卓博士,准备!!」 「嗯?什….」恩卓博士正处于萌呆状态,然而老大并不理会便朝桌上拍出一张纸, 恩卓博士一看,纸上写着:台啤、烧肉串。 「这是?」 「别发呆,快去准备这两样东西,我打算用它来交换新小六足的设计!」 「难道…是要请动那位传说中的 U大!?」 恩卓博士豁然开朗。 「没错,如果这些不够,我们再加!!」 老大的眼神充满了星芒。心中的 Maker 魂已经蠢蠢欲动。 就这样,经过一番游说(贿络)后,全世界第一台 86小六足在 U大鬼斧神工的设计下横空出世了。
功能说明
86Duino 3D 列印小六足! !从机构图到程式码完全开源,可在家自行下载档案,搭配 3D印表机和教学,满足手作欲望。不用写程式就能让马达动起来,使用开源 86ME 动作编辑软体,完成 86小六足走路、转弯、跳舞等等动作,赋予 86小六足强韧的生命力。一切从零开始,详细步骤全在下面教学内容,手作实力超强的你,还不赶快准备材料做一波! !
准备材料
- 一片 86Duino One 或 86Duino Zero 主控板(任一)
- 12 颗 Tower Pro SG90 伺服机(如第一次实作,建议多买 2 颗备用,即 14 颗)
- 一台 3D 列印机(此专案使用 86Duino 印匠 ENJOY) .辅助工具:锉刀、尖嘴钳
- 2mm x 4mm 螺丝 1 包(20 支以上) 2mm x 8mm 螺丝 1 包(20 支以上) 2mm x 15mm 螺丝 1 包(20 支以上) .组装工具:螺丝起子、2mm 攻牙刀、2mm 钻孔刀
- 一片电子扩充板(使用 86Duino Zero 时才需要,需自行手作,点我看详细) .一片洞洞板、3 个 3×4 的杜邦针脚和 1 个 1×2 的杜邦针脚 .焊接工具:烙铁、焊锡
- 2.54mm 杜邦线 12 条
准备好材料后,让我们动动手、活动活动筋骨,动工啦! ! 欧拉欧拉欧拉! ! (意义不明的呼喊)
列印机构
我们这里使用的 3D 印表机是 86Duino Enjoy,首先要下载并安装 86DuinoRepetier-Host, 然后按照 86Duino Enjoy 快速入门教学手册,把 86Duino Enjoy 的软体设定、机械参数调校好, 接下来就可以到 Thingiverse 网站下载 86小六足 STL 档案啰~ 下载回来的档案解压缩后,有 6 个档案: 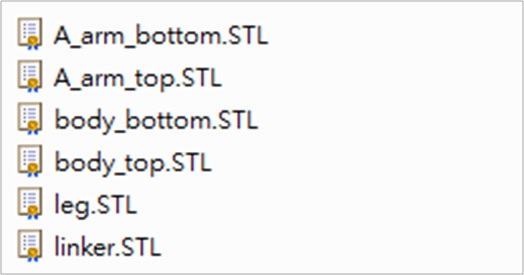
这 6 个档案的档名,是一一对应到 86小六足身上零件的,如下图: 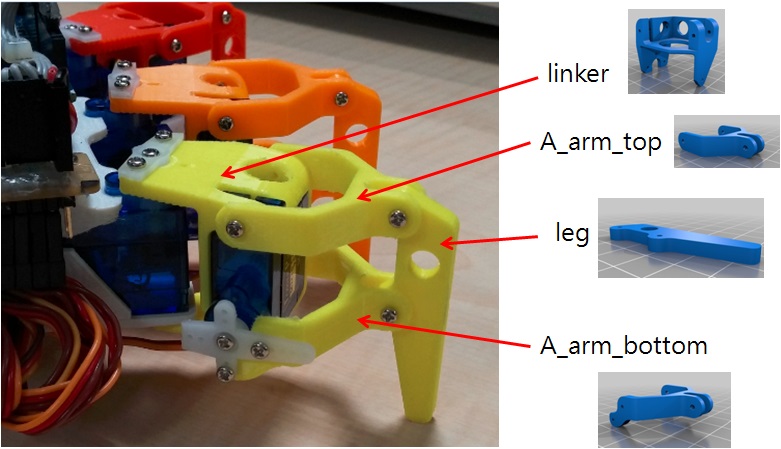
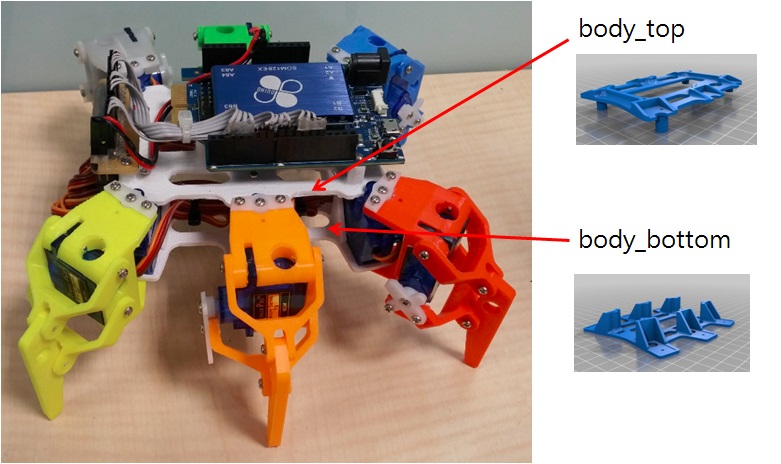 前 4 个零件:A_arm_bottom、A_arm_top、leg、linker,都是小六足脚部的分件,全部印好可以组合成一只脚(即脚数量的 1/6),只要重复列印 6 次,就会有小六足的 6 只脚了。 然后是 body_top 零件:小六足身体上半部零件 然后是 body_bottom 零件:小六足身体下半部零件 组合上面 2 个零件可以完成小六足身体,最后再把 6 只脚接上,86小六足就完成啦~ 我们先来看用 86Duino Enjoy 要怎么列印零件吧! 开启我们已经安装好的 86DuinoRepetier-Host,并且点击 Load 按钮,载入 4 个 86小六足脚部档案:A_arm_bottom、A_arm_top、leg 、linker。
前 4 个零件:A_arm_bottom、A_arm_top、leg、linker,都是小六足脚部的分件,全部印好可以组合成一只脚(即脚数量的 1/6),只要重复列印 6 次,就会有小六足的 6 只脚了。 然后是 body_top 零件:小六足身体上半部零件 然后是 body_bottom 零件:小六足身体下半部零件 组合上面 2 个零件可以完成小六足身体,最后再把 6 只脚接上,86小六足就完成啦~ 我们先来看用 86Duino Enjoy 要怎么列印零件吧! 开启我们已经安装好的 86DuinoRepetier-Host,并且点击 Load 按钮,载入 4 个 86小六足脚部档案:A_arm_bottom、A_arm_top、leg 、linker。 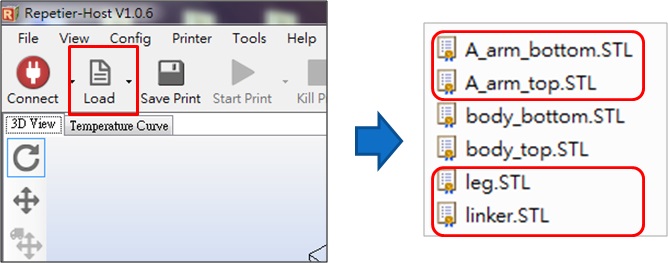
载入后的图如下: 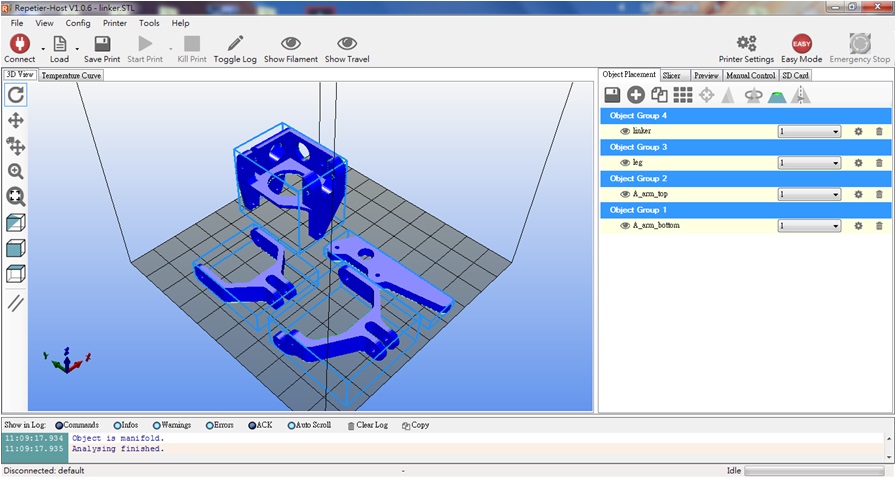 点选 Linker,将零件沿着 Y 轴翻转 90 度,如下图:
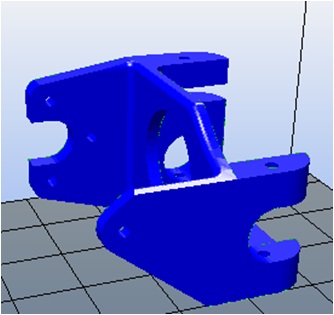
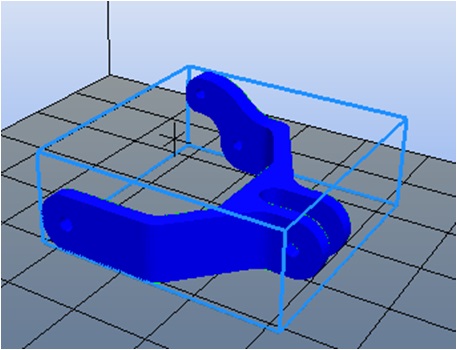
点选 Linker,将零件沿着 Y 轴翻转 90 度,如下图: 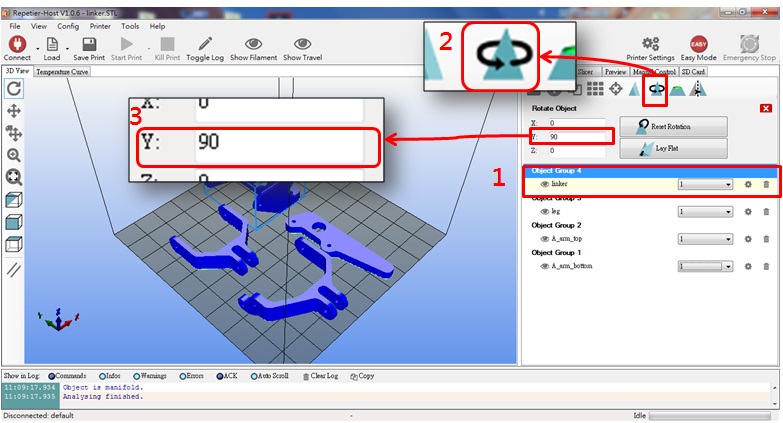 翻转后的 linker 零件,摆放角度应如下图:
翻转后的 linker 零件,摆放角度应如下图:
点选 A_arm_bottom,将零件沿着 Y 轴翻转 180 度,如下图: 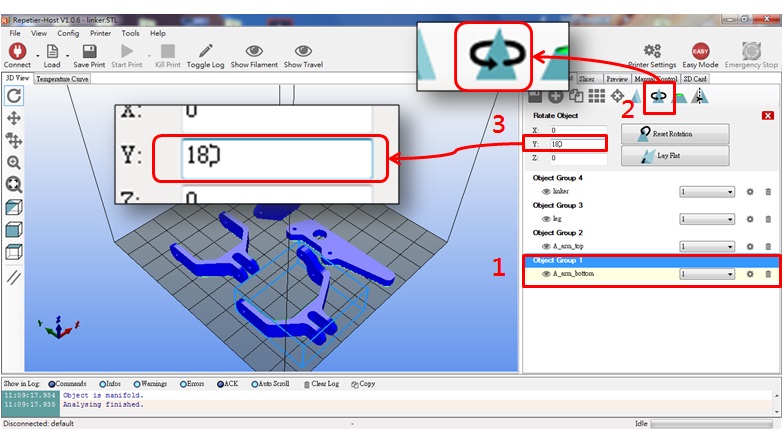 翻转后的 A_arm_bottom 零件,摆放角度应如下图:
翻转后的 A_arm_bottom 零件,摆放角度应如下图:
翻转完成后的足部零件如下图: 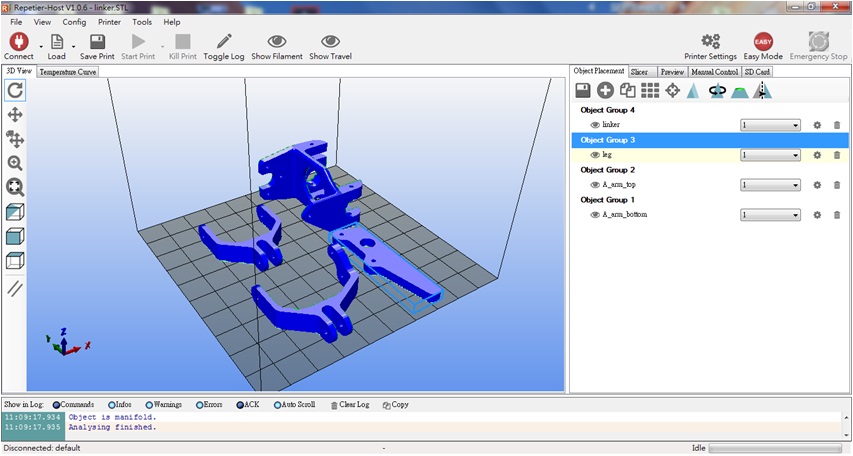 打开支撑选项,设定 Support Type 为 Everywhere:
打开支撑选项,设定 Support Type 为 Everywhere: 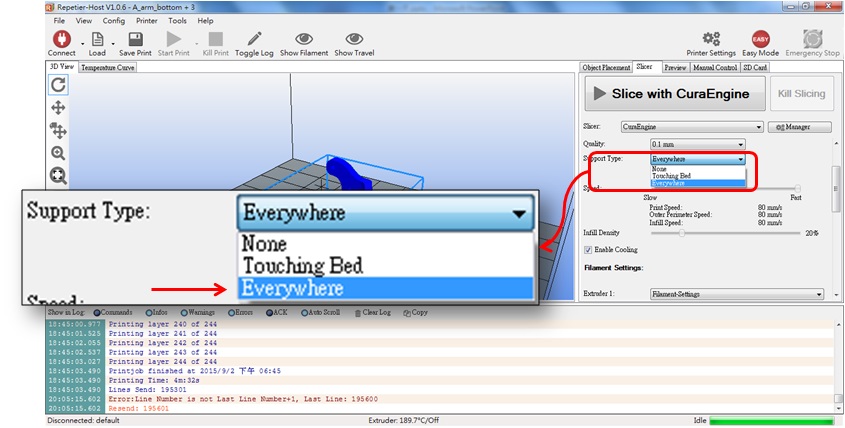 来到这边,我们一共经历了 2 种过程:
来到这边,我们一共经历了 2 种过程:
1. 翻转零件
2. 开支撑
到这里有很多人不明所以,为什么要这样做呢?
首先,我们知道这台 3D 印表机是以一种叫 "熔融层积" 方法进行列印的,它会加热喷头让印料融化,再将印料从喷头挤出,热的印料遇到冷空气很快会变冷、变硬,随着喷头走完所有路径,冷却的层形成一个坚硬的平面,然后喷头向上拉高(或降低零件座),让第二层继续堆积上去,就是这样的过程,印完一层,喷头拉高,印完一层、喷头拉高,反覆下去直到零件最顶层,那么零件就 "印" 出来了。
我们知道,零件可不总是一块实心立方体,如果是,那很容易就印成功了,嗯?难道列印还会失败? 没错,不了解列印过程的话,要失败的机率还不小,下面带大家看一下使用这类印表机必须注意的地方,就会知道我们要翻转零件和开支撑的原因了:
像我们上面看到的 linker 零件,它是一个多孔不规则零件,以 "熔融层积" 列印方法,一定会印到一层中的 "某些路径" 刚好是没有前一层做支撑的(即该路径下方是悬空的,可能就是一个孔!),那么喷头经过这些路径时,印料会来不及冷却而被重力拉垂,轻则让外观难看,重则让零件整个无法成形。外观难看似乎可以理解,但严重到无法成形是哪招?
关键在悬空那层是否能形成一个稳固平面,一旦无法形成,这层之上的所有层自然没了个底,那么印料等于从喷头落下,直接在空中冷却(因为没有底),随着喷头移动在空中形成一条条凌乱的线,最后我们得到的是一堆线而不是完整的零件,不仅浪费了时间也浪费了印料。
为了不发生这样的事件,所以我们将零件翻转,让零件每一层的悬空路径最短、甚至完全没有,那么不仅提升了成功率,同时也提高了成品外观。毕竟我们的零件都不是实心立方体。
如果不管怎么翻,总找不到适合的角度怎么办?
这时候我们可以开启软体的 "支撑" 选项,让软体自行产生支撑件,让那些悬空区域有个底,等列印完成,再手动拆除这些支撑件就好,虽然后续多出了拆除步骤,但总比列印失败要好!
看到这里,有些初次使用 3D 印表机的人问了,如果我不考虑摆放角度,直接开启软体的 "支撑" 选项可不可以? 老实说,是可以的,这样最省时而且不必考虑怎么翻,是吧? 反正是软体自动产生支撑件,那也不用怕印失败,开下去就对了!
从结果上来说,这个想法或许是正确的,但是软体在哪里产生支撑件,产生多少支撑件,我们不能控制,只能由软体根据它的演算法来任意产生,导致印完后您可能会陷入拆支撑件地狱中(因为产生的支撑件过多),尤其是狭小缝隙的支撑件,想快速拆除又很难拆,好不容易拆完,边缘还有残渣,影响组装,所以拿锉刀磨平…。过多的支撑件总是在后续拆除时把我们给惹火,如果不想经历这种 "磨" 难,建议替零件翻面数次,主动找到让支撑件产生最少的角度(一方面也节省了印料)。
有些人说他很喜欢拆支撑件的感觉….霹雳啪啦听起来很爽,那要选择此方法我们也不反对(你知道,过程总是藏着某些人的 Maker 魂)。
以上是玩这类 3D 印表机的心得体会,不管你有没有看完那些落落长的叙述,接下来,就要进行下一步,按下切片按钮(slice),软体会自行加上它认为应该要加上支撑的部位,最后产生 G-code 档,这是 86Duino Enjoy 印表机看的懂的档案, 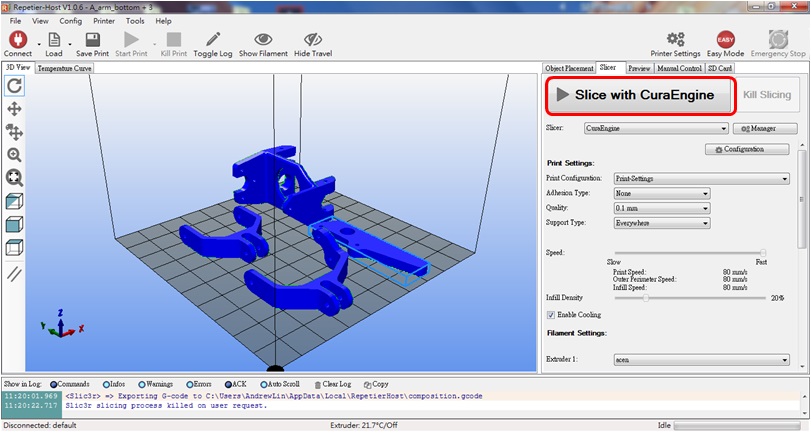 完成后会出现类似下面画面:
完成后会出现类似下面画面: 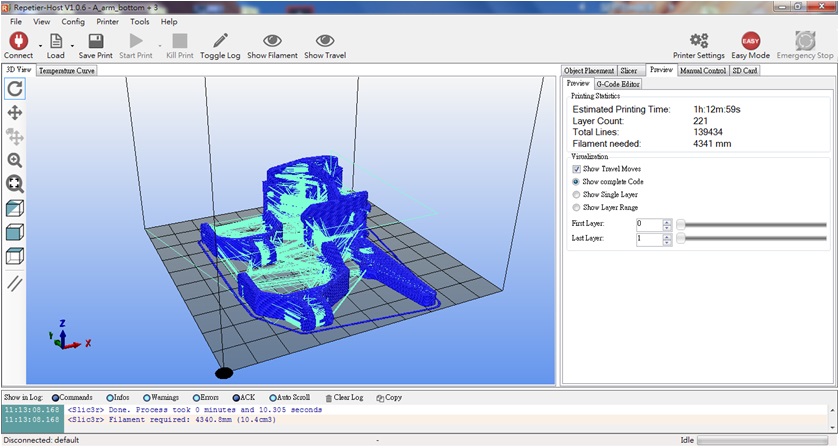 这时候就准备传输档案给 86Duino Enjoy 啦~ 传输方法有两种:
这时候就准备传输档案给 86Duino Enjoy 啦~ 传输方法有两种:
方法一:使用 USB 线传输
切片完成后,接上 USB 传输线,然后按下列印按钮,86Duino Enjoy 就会立即开始列印: 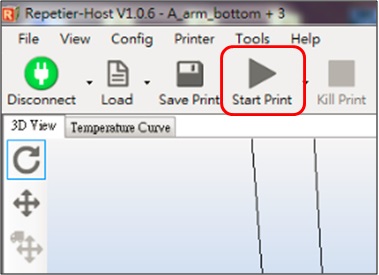
方法二:使用 SD 卡
插上 SD 卡至您的电脑, 切片完成后,点击如下图示, 将 G-code 档储存至 SD 卡中:选择 G-Code Editor 分页 > 按下储存按钮 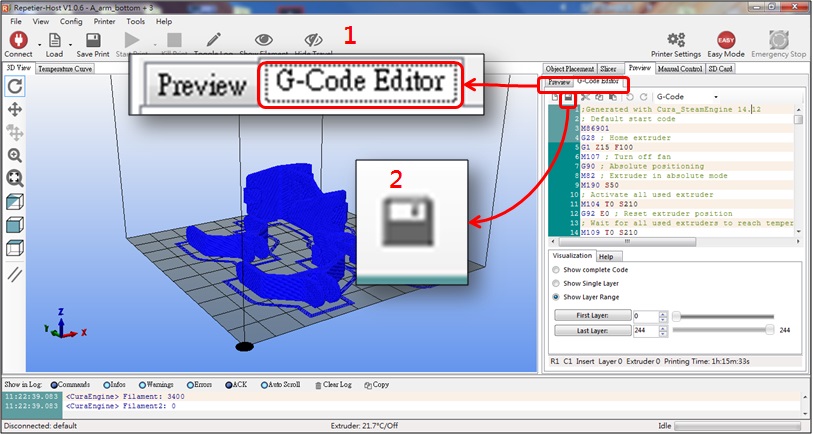 将档案储存在 SD 卡中的 gcode 资料夹下,储存档名改成 auto.gcode,按存档
将档案储存在 SD 卡中的 gcode 资料夹下,储存档名改成 auto.gcode,按存档 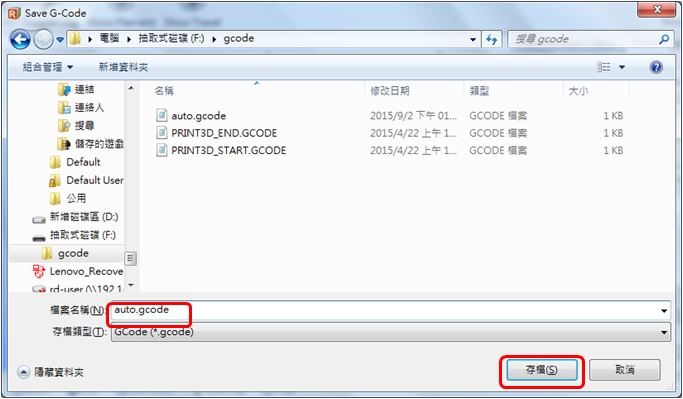 从电脑拔出 SD 卡,将此 SD 卡置入 86Duino Enjoy 背面的 SD 卡插槽,
从电脑拔出 SD 卡,将此 SD 卡置入 86Duino Enjoy 背面的 SD 卡插槽,
打开 86Duino Enjoy 电源,86Duino Enjoy 会自动读取 auto.gcode 档开始列印!
要完成一整只 86小六足一共要列印:
1. 6 个足部
2. 1 个身体上半部
3. 1 个身体下半部
列印的过程,可能会花一段满长的时间,您可以喝个咖啡,休息一下,等零件全部印完再进行下一步。
组合零件
刚印好的零件上面是有很多支撑的,我们必须先拆除它们: linker 零件,使用尖嘴钳拆除以下支撑: 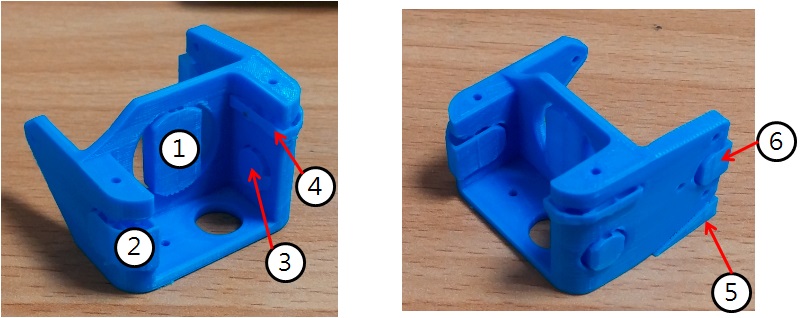 body_top 零件,使用尖嘴钳拆除以下支撑:
body_top 零件,使用尖嘴钳拆除以下支撑: 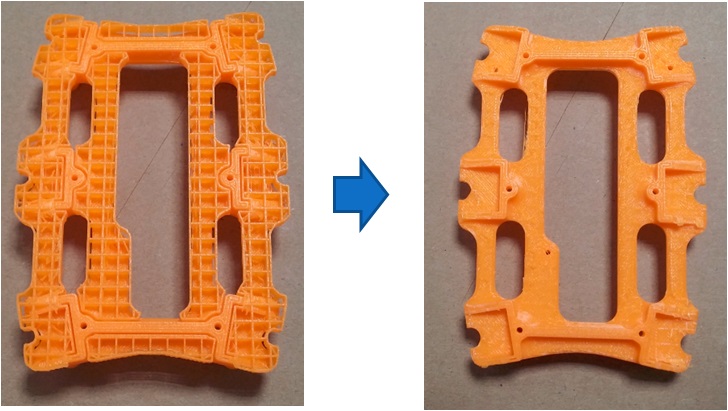 支撑拆下来后,您会发现拆除面还残留一些毛边(凸起),这不利于接下来的组装,所以我们拿起手边的平锉刀,将这些毛边打磨平整。 对于 linker 零件,用平锉刀将不平整的表面磨平(下图箭头处):
支撑拆下来后,您会发现拆除面还残留一些毛边(凸起),这不利于接下来的组装,所以我们拿起手边的平锉刀,将这些毛边打磨平整。 对于 linker 零件,用平锉刀将不平整的表面磨平(下图箭头处):  磨到可以将伺服机顺利置入即可:
磨到可以将伺服机顺利置入即可: 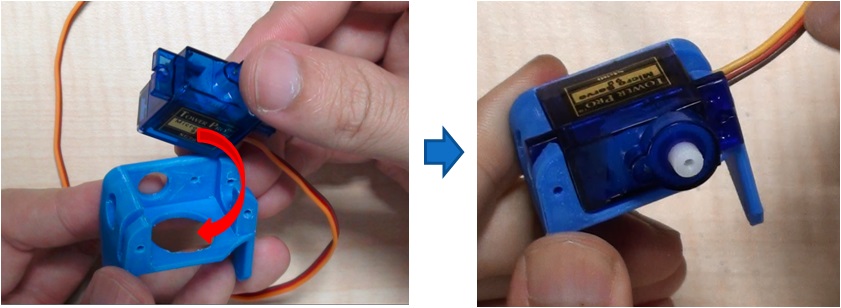 对于 body_top 零件也是一样,打磨到伺服机可以容易的置入:
对于 body_top 零件也是一样,打磨到伺服机可以容易的置入: 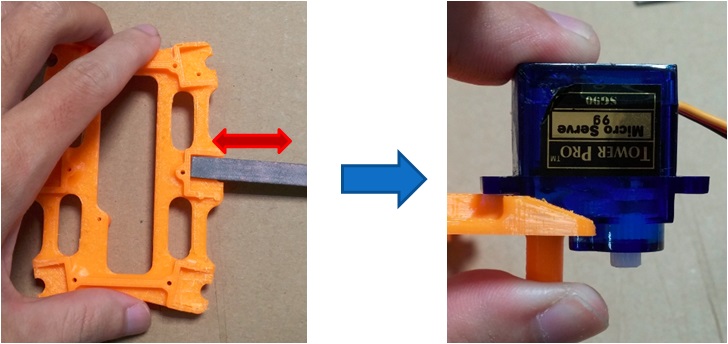 最后是 body_bottom 零件,打磨到伺服机可以顺利压入:
最后是 body_bottom 零件,打磨到伺服机可以顺利压入: 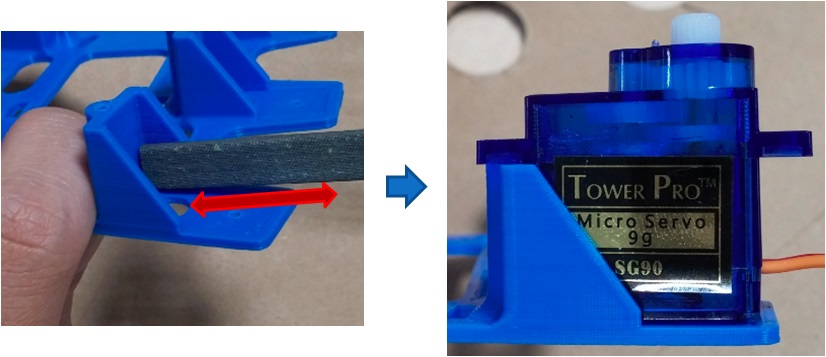 接下来可以开始组装了吗?别急,我们要还要钻孔与攻牙:
接下来可以开始组装了吗?别急,我们要还要钻孔与攻牙:
需要攻牙的孔,如下图红圈处:
Linker 零件: 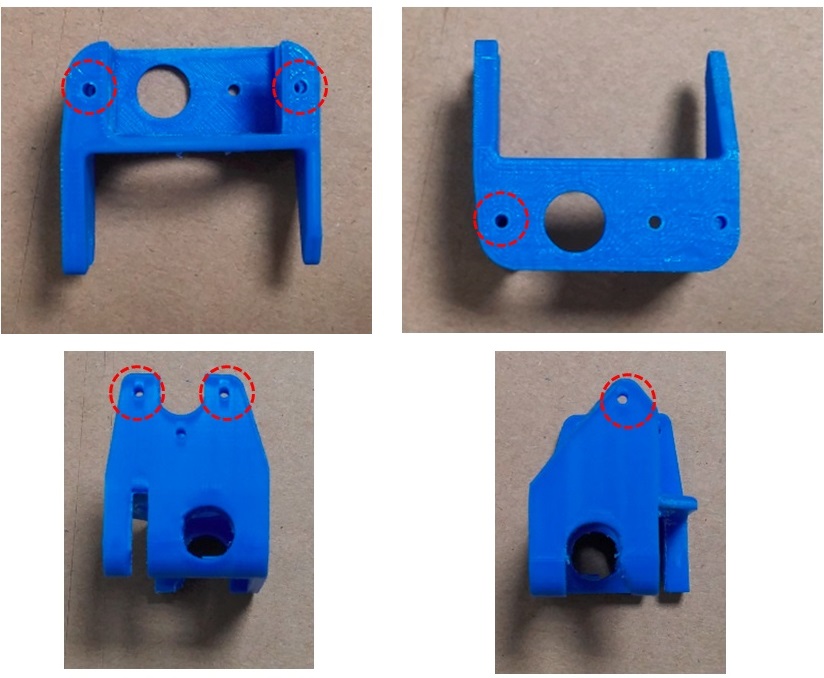 A_arm_bottom 、leg 零件:
A_arm_bottom 、leg 零件: 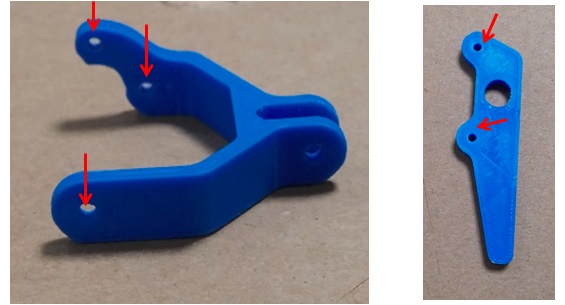 body_top 、body_bottom 零件:
body_top 、body_bottom 零件: 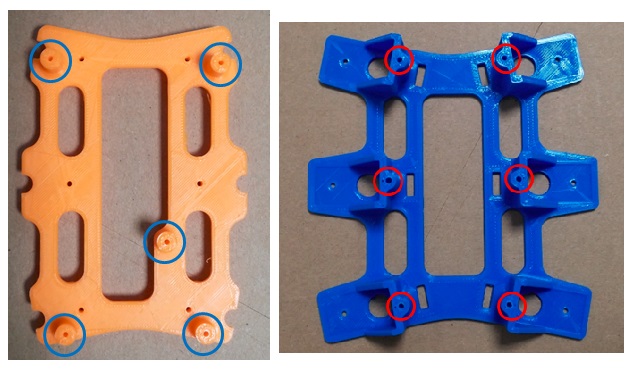 需要钻孔的孔,如下图红圈处:
需要钻孔的孔,如下图红圈处:
Linker、A_arm_bottom、A_arm_top 零件: 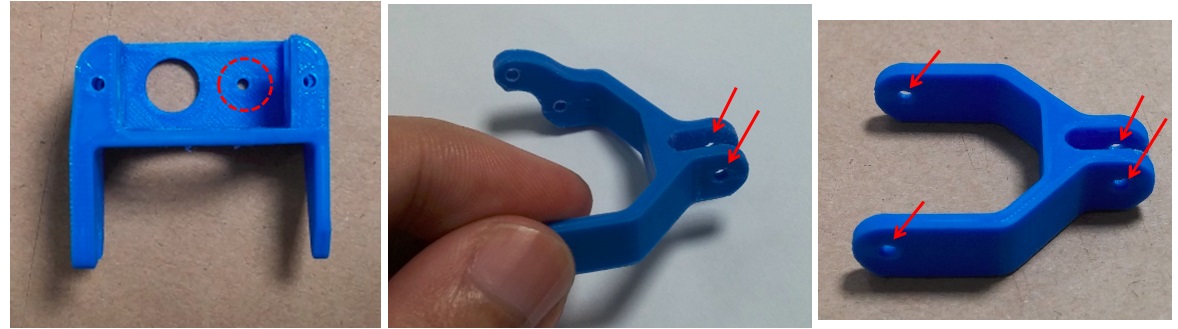 body_top、body_bottom 零件:
body_top、body_bottom 零件: 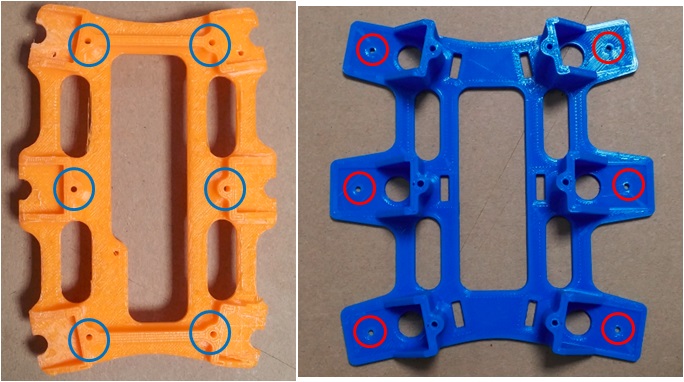 完成后,我们便可以准备将转盘安装至伺服机上,但要先对伺服机做归零的动作,归零是指将伺服机转动至可动范围的正中央,我们利用 Servo86 函式库将伺服机归零,并使用 86Duino IDE 烧录归零程式至 86Duino 开发板上,以下提供范例程式码:
完成后,我们便可以准备将转盘安装至伺服机上,但要先对伺服机做归零的动作,归零是指将伺服机转动至可动范围的正中央,我们利用 Servo86 函式库将伺服机归零,并使用 86Duino IDE 烧录归零程式至 86Duino 开发板上,以下提供范例程式码:
86Duino Zero 归零程式
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
|
86Duino One 归零程式
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
|
烧录完成后, 86Duino 会立刻从指定脚位送出 duty 为 1500us 的 PWM,接着我们要将伺服机与 86Duino 连接起来。
将 86Duino 接上电源/电池后,伺服机会立即转到中点位置,此时将十字型配件盘的短轴对齐中点 (标记线),套在伺服机输出轴上,如下图所示: 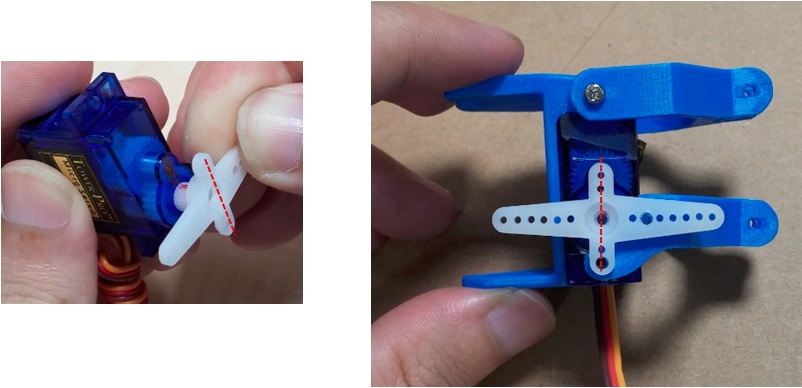 完成后便可用螺丝锁上零件,最后完成图如下,也可以用斜口钳修饰配件盘,剪除较长的边:
完成后便可用螺丝锁上零件,最后完成图如下,也可以用斜口钳修饰配件盘,剪除较长的边:
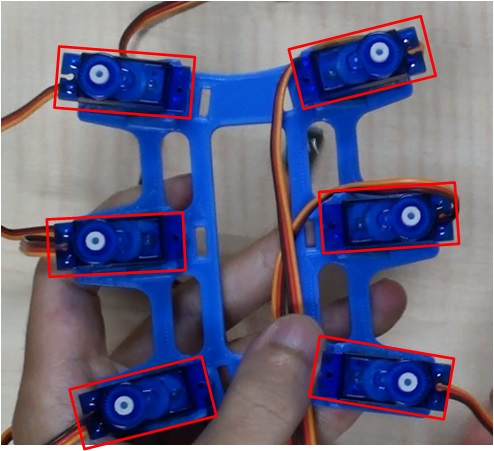
完成六个足部后接着就可以来组合身体,将 6 颗伺服机置于 body_bootom,如下图:
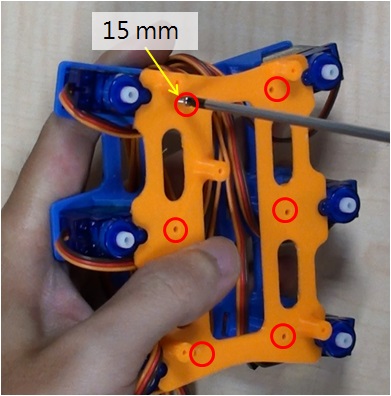
将落在外侧的伺服机连接线,各别拉至身体中央,统一从一端伸出 (这么做是为了方便后续整线): 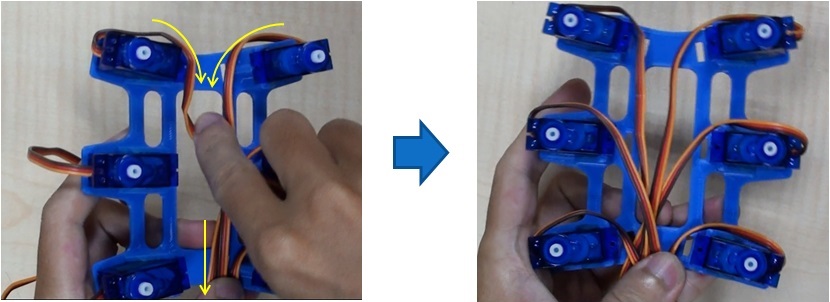 盖上 body_top 零件,并用 6 颗长度15mm 的螺丝锁紧 body_top,如下图红圈处:
盖上 body_top 零件,并用 6 颗长度15mm 的螺丝锁紧 body_top,如下图红圈处:
使用钻孔刀对一字型配件盘钻孔 (由中心数来第二个孔,如下图),一共要对 6 个一字型配件盘钻孔: 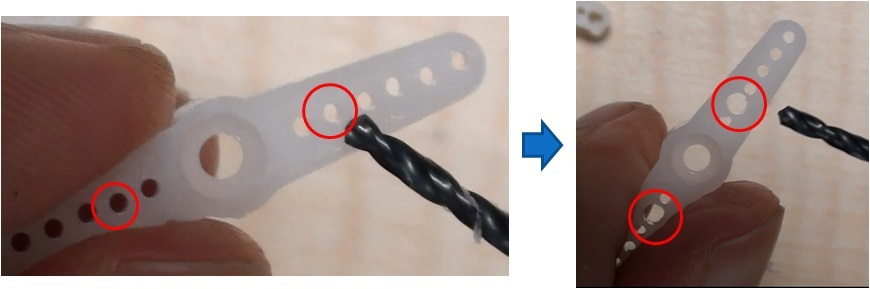 用刚才提供的归零程式把六颗伺服机分别归零至中点,并将一字型配件盘照下图方式套至伺服机输出轴:
用刚才提供的归零程式把六颗伺服机分别归零至中点,并将一字型配件盘照下图方式套至伺服机输出轴:
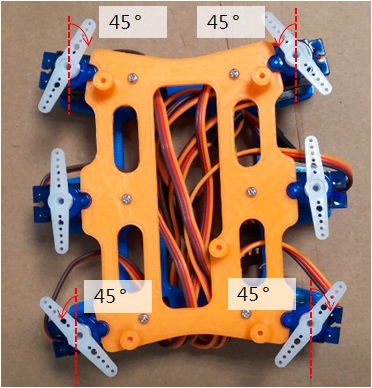
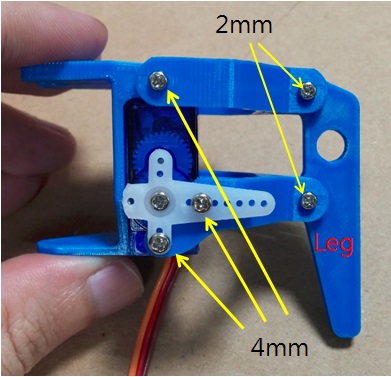
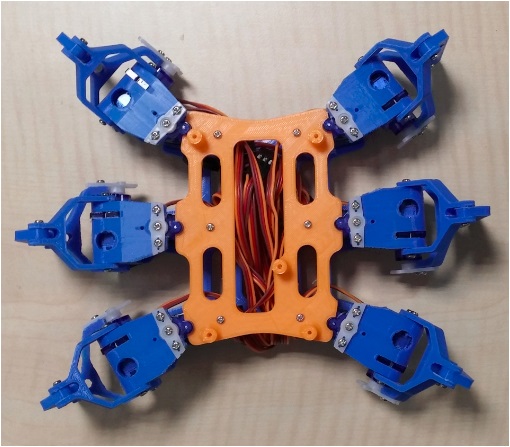
用 3 颗 2mm x 4mm 螺丝结合足部 (2 颗固定配件盘,另一颗固定 linker 与 body_bottom),并以自攻螺丝锁紧伺服机一字型配件盘,可以用斜口钳将一字型配件盘凸出的部分剪除,增加美观:: 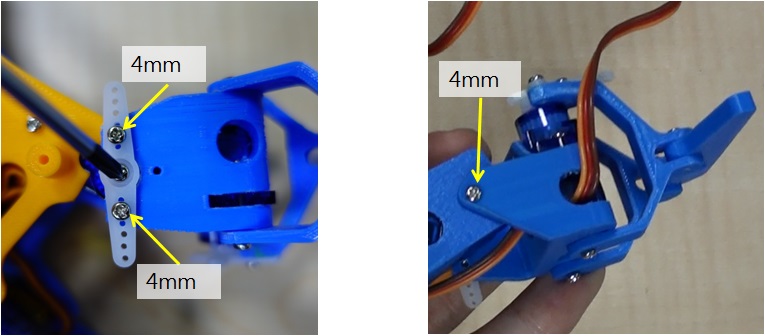 6 个足部全部锁上后,如下图:
6 个足部全部锁上后,如下图:
装上 86Duino Zero 开发板
对应下图红圈处,用 3 颗 2mm x 4mm 螺丝固定 86DuinoZero 于 body_top 上: 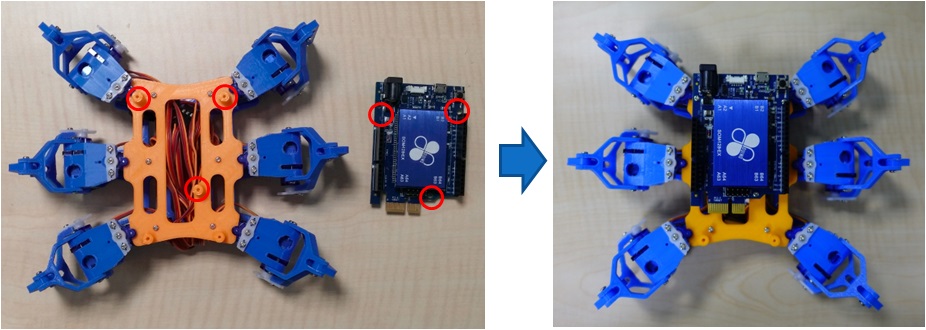 用 2 颗 2mm x 4mm 螺丝固定扩充板:
用 2 颗 2mm x 4mm 螺丝固定扩充板: 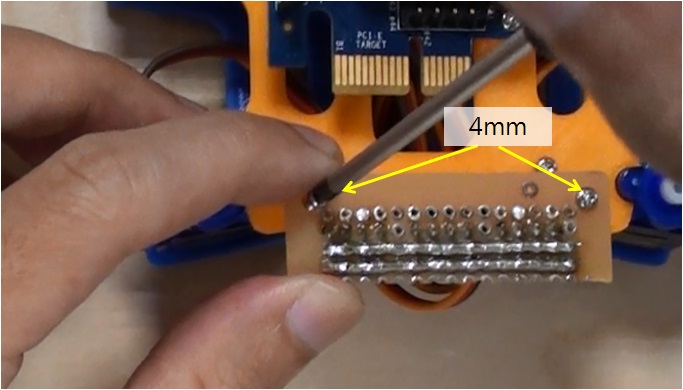 86小六足伺服机编号与扩充板上的脚位对应如下:
86小六足伺服机编号与扩充板上的脚位对应如下: 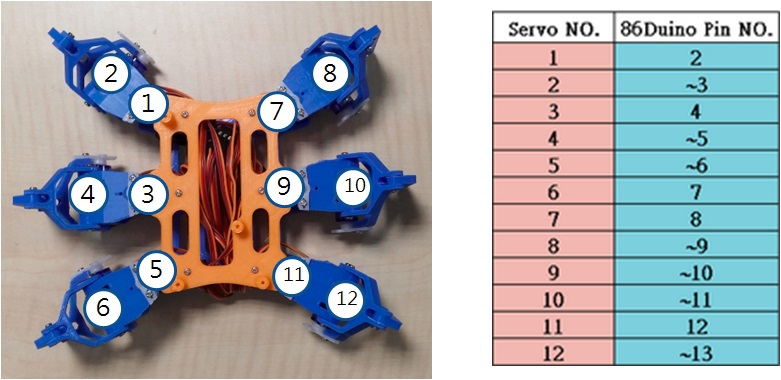 使用 12 条黄色 (PWM)、1 条红色(VIN)、1 条黑色(GND)的杜邦线连接 86DuinoZero 和转接板:
使用 12 条黄色 (PWM)、1 条红色(VIN)、1 条黑色(GND)的杜邦线连接 86DuinoZero 和转接板: 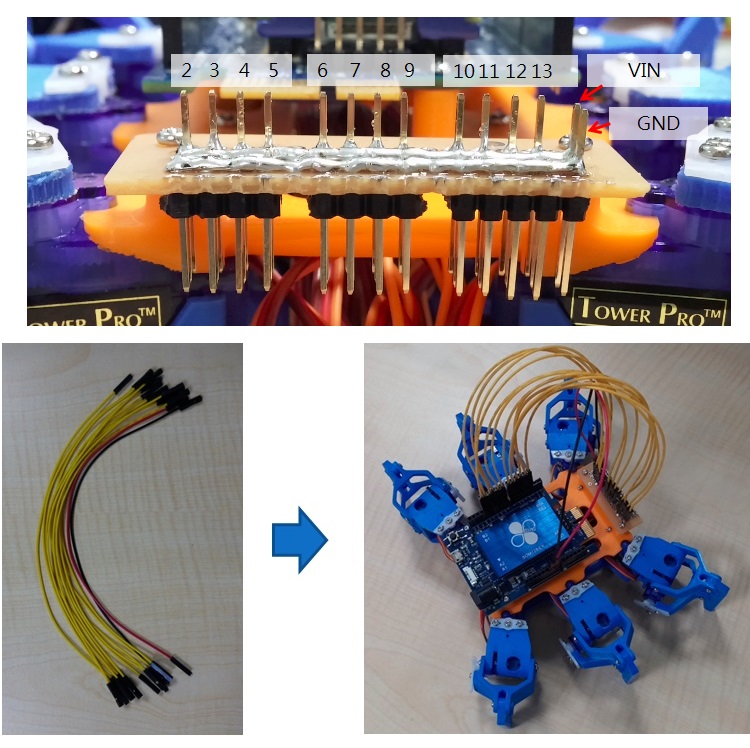
装上 86Duino One 开发板
对应下图红圈处,用 3 颗 2mm x 4mm 螺丝将 86DuinoOne 固定于 body_top 零件上: 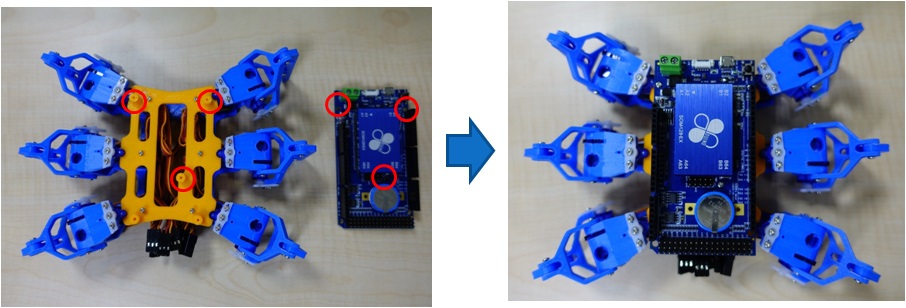 86小六足伺服机编号与 86DuinoOne 上的脚位对应如下:
86小六足伺服机编号与 86DuinoOne 上的脚位对应如下: 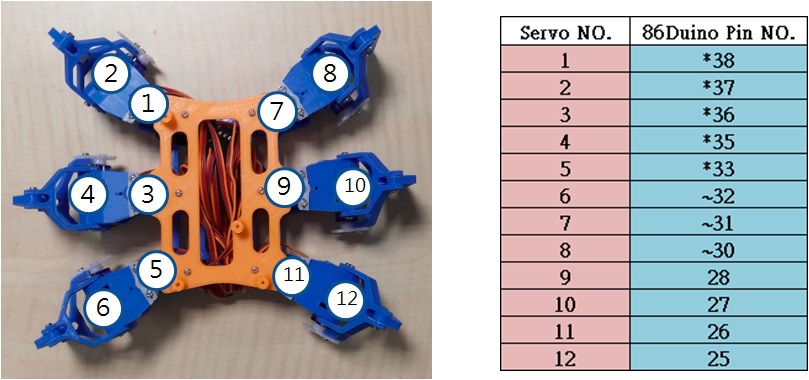 将所有伺服机连接线连接至 86DuinoOne 上:
将所有伺服机连接线连接至 86DuinoOne 上: 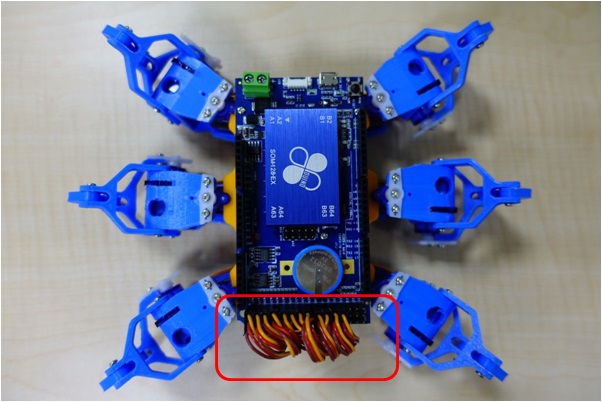 最后我们将外露的连接线稍做整理,让 86小六足看起来更美观。 先将外露的伺服机连接线拉至 86小六足身体内,将伺服机连接线来回折短,用束线带固定在两旁支架:
最后我们将外露的连接线稍做整理,让 86小六足看起来更美观。 先将外露的伺服机连接线拉至 86小六足身体内,将伺服机连接线来回折短,用束线带固定在两旁支架: 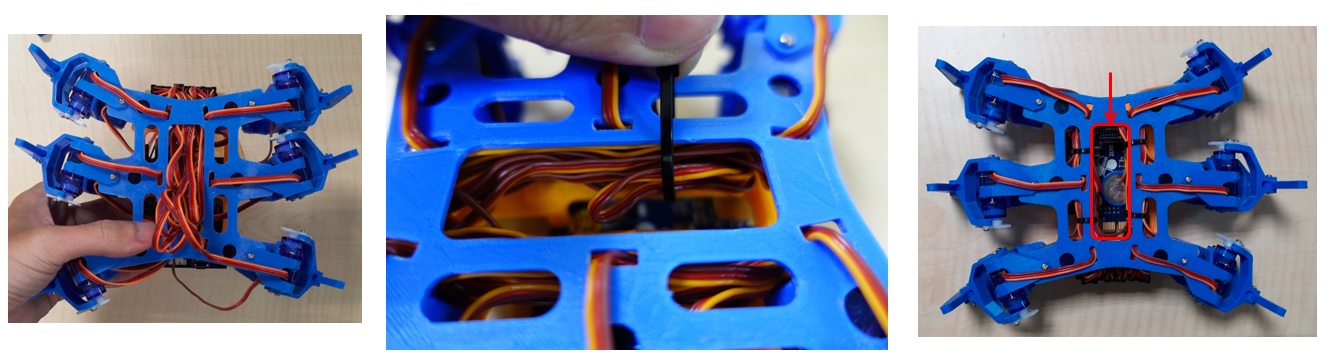 用束线带固定完成后,尽量让右图红框处没有伺服机连接线穿过,因为这是未来要放置锂电池的空间。
用束线带固定完成后,尽量让右图红框处没有伺服机连接线穿过,因为这是未来要放置锂电池的空间。
动作控制
由于 86ME Mk-II 已经将 86小六足的应用专案设为范例专案,你可以在 C:\ProgramData\86ME\examples 里面找到 86Hexapod.rbm 的步行动作。 开启专案后记得要根据每台 86小六足去微调它的 offset 值,可以校正一些伺服机上的小误差。
成果展示
— DEMO影片 —
相关资料
[1] 完整课程影片
[2] STL 机构档下载
[3] 86小六足机器人 DIY 课程教材:
自造游乐园主页面
86Duino 参考资料的文本遵循 知识共享署名-相同方式共享 3.0 许可证。参考资料中的代码示例已发布到公共领域。