86Duino One ハードウェア說明
ご紹介
86Duino Oneはx86イーサネットのマイクロネット開発ボードであり、内部に32ビットのプロセッサを採用し、Arduinoのプログラムを実行することが可能です。
Oneは86Duinoのロボット用インターフェースであり、Arduino UNO 及び Leonardoに対し同様のインターフェイスユニットを提供し、並びに18個RCサーバー専用コネクター、RS485、CANBus等を内蔵し、また、10Aまでの電流が耐えられます。
Arduinoは86Duino Oneを学習するための敷居を低くし、環境が整っていなくても、基本的なパソコン操作能力さえあれば、容易に学習に使用でき、Arduinoユーザーやその他の書学者、設計者、芸術家、愛好者等如何なる人に対してもぴったりで、自分だけの電気によって稼働するロボットを作り上げることができます。
スベック
- CPU コンプレッサ:x86イーサネット 32 ビットコンプレッサVortex86EX,主要クロック 300MHz(可用 SysImage ツールソフトウェアを用いると、最高で500MHz)
- RAM メモリ:128MB/1GB 工業規格 DDR3 SDRAM
- Flash メモリ: 8MB内蔵,出荷時に既にBIOS 及び 86Duino 等をインストール済み
- 1 個の 10M/100Mbps イーサネット
- 1 個のUSB Host ポート
- 1 個の MicroSD スロット
- 1 個の Mini PCI-E
- 1 個のオーディオ出力スロット、1マイク出力スロット(Realtek ALC262ハイファイオーディオチップ内蔵)
- 1 個のUSB Device ポート(5V 入力,Type B micro-USB,バーニングプログラミングポート)
- 1 個の6V-24V 外部電源入力ポート
- 45本のシグナル入力/出力ピン(GPIO),18個のRCサーボコネクタを装備
- 3個 のTTL シリアルポート(UART)
- 1 個 RS485 串列埠
- 4 組 のEncoder ポート
- 7本のA/D 入力ピン
- 11本の PWM 出力ピン
- 1 個のSPI ポート
- 1 個のI2C ポート
- 1 個のCAN Bus ポート
- 3 軸加速度計
- 3 軸ジャイロスコープ
- 2 の 5V電圧出力ピン,2 本の 3.3V 電圧出力ピン
- 全長:101.06mm,幅:53.34mm
- 重さ:56g
I/O レイアウト
寸法図
86Duino One の大きさは基本的にArduino Mega 2560 と同様であり,下図に示した通り:(完全サイズダウンロード)
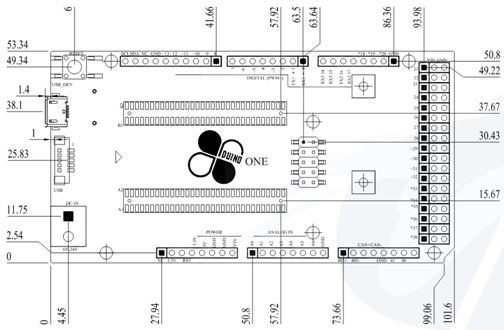
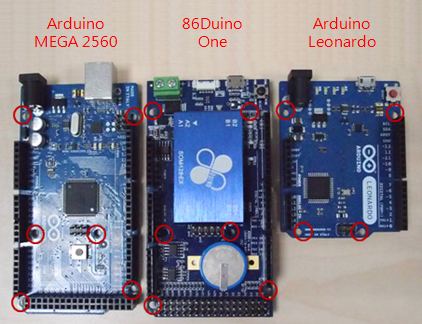
このほか下図からOneの固定穴位置(赤丸の所)がArduino Mega 2560と同じことが確認できる。
ポート位置
86Duino One の Pin-Out Diagram は下図の通り(クリックで拡大):
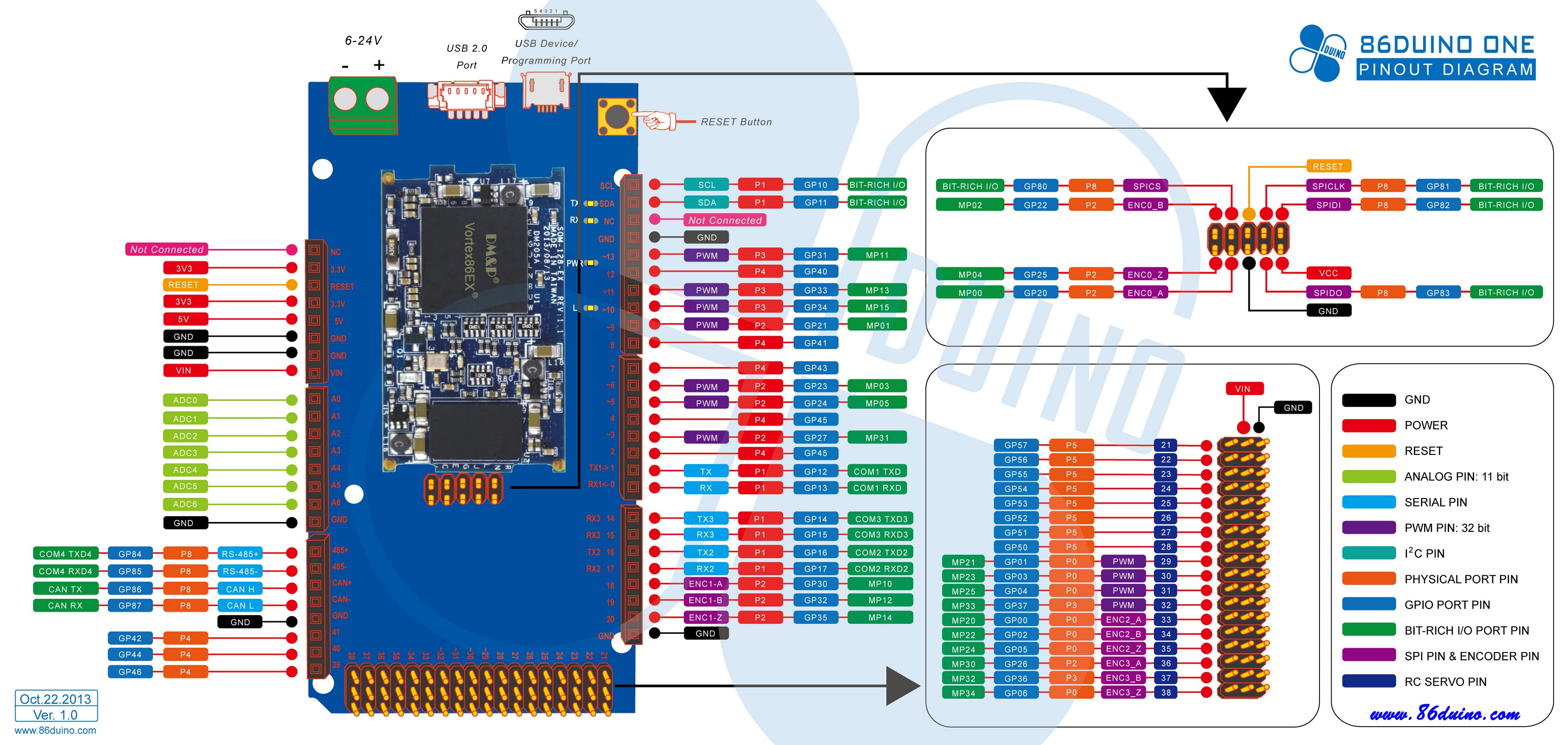
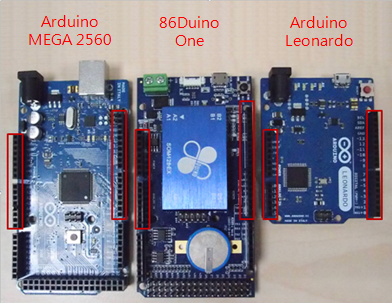
Pin-Out Diagramを通Oneのピン(下図赤丸の所)がArduino LeonardoとArduino Mega 2560と同じことが確認できる。その為、OneはArduino Uno 及び Leonardoユーザーの拡張ボードを積み重ねることが可能である(例えば、Arduino WiFi Shield)。しかし、Arduino Mega 2560 專の長型拡張ボードを重ねることができない(例えばRAMPS 1.4)。
I/O ポート機能紹介
一、電源システム
86Duino Oneは二つの電源入力ポートを持ち、一つは外部用で差込口がグリーン端子台、左下の赤丸の所がそうであり、可能な電圧範囲は6V ~ 24Vである。
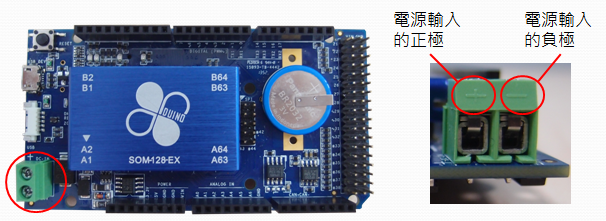
もう一つはバーニングプログラム用のmicro-USBであり(左下赤丸の所参照)、電圧は5Vでなくてはならない。

ユーザーは上記のポートからOneに給電が可能である。貴方が外部の電源を使用する時には、ボードに内蔵されたチップに繋ぎ、下図に示した通りの、正常な動作を行う必要がある。micro-USBポートを通じ給電する際、USBの5Vの電圧をby-pass方式を用いてボード上のパーツに直接プログラミングすることが可能である。外部電源コネクタとmicro-USBコネクタは同時使用可能である。
グリーン端子台による電源の接続方
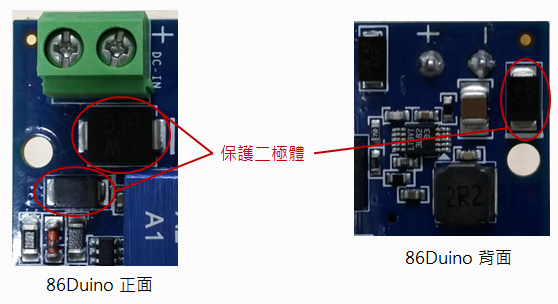
グリーン端子台を使用し、ロボットサーボが必要とする大電流を入力することができます。入力電圧はすべてのVINピンにby-passされ、レギュレータに入力されて安定した5V電圧を生成します。出力。この電源入力の回路は次のとおりです。
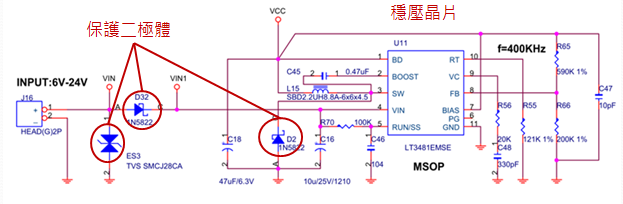
ロボットの電源は通常大電力であるため、誤って回路基板を焼き付けることは容易です。したがって、電力サージ(スパーク)や電力逆挿入(正および負極)を防ぐために、TVSダイオード保護を回路に追加しました。 反転)などがボードのコンポーネントを破壊します。 (電源リバースプラグの保護には限界があり、40Vを超えるバックサプライ電圧は避ける必要があります)。
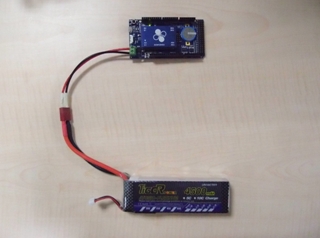
電池による給電:
通常、ロボットは高電流を電源として出力できる電池を使用していますが、電池の正と負のワイヤをグリーン端子台に直接接続してOneを供給することができます。
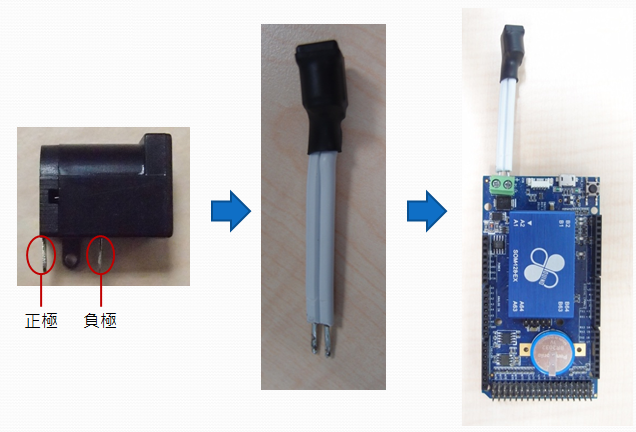
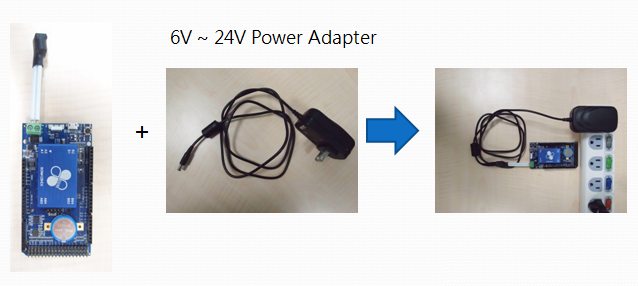
ACアダプターによる給電:
一般的な家庭用電源トランスを使用してOneに電力を供給する場合は、変圧器を接続するためのアダプタを作成することを推奨します。 ここでは、2.1mmオスの電源コネクタを使用した変圧器を例に説明します。2.1mm電源ベースを準備します(下図参照)。2本の電線を電源ベースのプラスとマイナスの端子に溶接してください。 端子台の上で、電源ベースを変圧器に接続し、変圧器をグリーン端子台に移します。
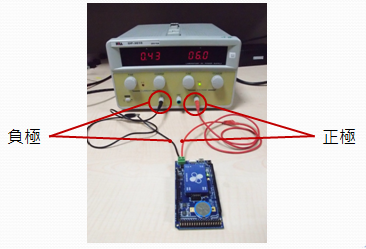
DC直流電源器による給電の接続方
DC電源を使用してOneに電力を供給することは非常に簡単です。電源の正および負の極を直接出力し、グリーン端子台の正および負の入力を正および負の接続でロックします。
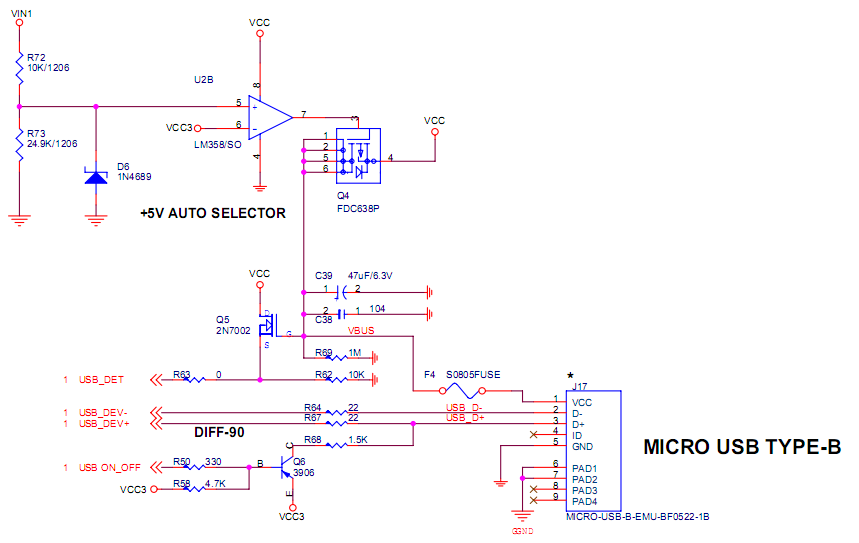
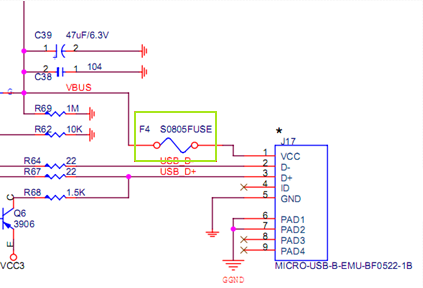
micro-USB によるコネクタ電源接続方法
ボード上のmicro-USBコネクタを通じてUSBメインボードホール或いはUSB充電器の5V電圧をZeroに給電することが可能である。メインボードの破損を避けるため、コネクタ内に1アンペアのヒューズを内蔵し、保護を行う。
ユーザーはmicro-USBを1本用意しType A USBに節電する(例:スマートフォンのケーブル;86Duino One 配線キット內にこれを含む)詳細は下図参照。
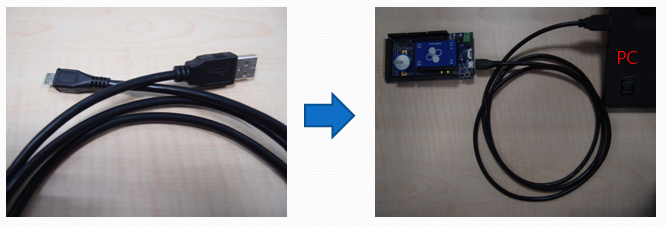
このケーブルをOneとUSB充電器を接続して、充電ができます:

注意していただきたいのは、86Duino Oneに如何なる外部装置も付けていない時(例:USBキーボードマウス)、少なくとも440mAの電流により正常に作動する;
一般のPC 或いはノートパソコンのUSB 2.0ポートが供給可能なのは最大で500mAの電流までで、それで十分Oneを作動させることができるが、もし、Oneに接続された外部装置(USB蔵置及び5V 及 び3.3V出力の実験電気回路含む)が、外部接続装置の消耗電流が非常に大きい場合、消耗電流が500mAを超えてしまう場合は、PC の USB 2.0ポートを使ってOneに給電するのは、ふさわしくない。
註:古いものや設計がよくないPC及びノートパソコンはUSBポートの設計に難が有り、供給可能な電源はUSB 2.0 規格の500mA以下とし、このようなPCを用いて86Duino Oneに給電すると、正常に作動できない可能性が有る(例えば起動できない或いはプログラムのバーニングができない)ので、この時は、900mA USB3.0パソコンを変えて改めて試してみてほしい。
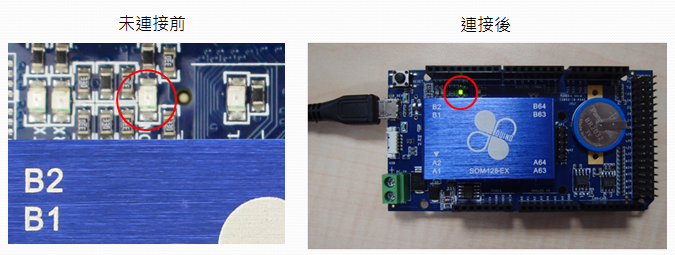
電源指示ランプ
86Duino Oneが正確に電源に接続された後、電源の指示ランプ“ON”が下図のように輝く:
電源出力ポート
86Duino Oneボード上に配置された多くの電圧出力ピンは、3種に大別できるすなわち:
3.3V、5V と VINであり,詳細は下図の通り:
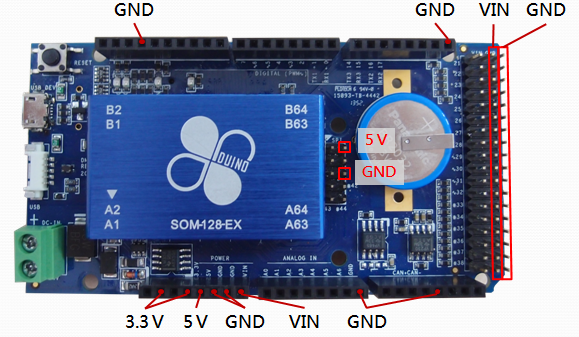
3.3V、5V出力ピンは電子実験の電圧原として作られ、其の中の3.3Vピンは最高出力電流が400mA,5Vピンの最高出力は1000mAである。VIN出力とグリーン端子台の外部電源入力は共用であり、言い換えれば、両社は電気回路上に連接している;VINピンは主に外部装置で電圧が比較的高い時に用いられる。
注意してほしいのは、もし、あなたの実験回路の消耗が1Aを超えたとき(例えば直流モーター)、VIN出力ピンを用いるべきで、5Vと3.3Vピンの給電は避けるべきだ、ということだ。このほか、VIN出力電圧は5Vより高く、I/Oピンが焼ける可能性が有る。
二、MicroSD カードスロット
86Duino Oneは最大 32GB SDHC の Micro SD カードをサポートし, SDXCをサポートしません。
注意していただきたいのは、貴方がもしMicro SDカードの中にWindows 或いは Linux作業システムをインストールする場合、Micro SDカード本体の処理速度に影響を及ぼすので、Class 10のMicro SDカードを使用することをお勧めする。
SysImageツールについて、貴方はMicro SDカードに86Duinoにシステムを入れることができるサービスを提供している。詳しい説明については、更なる說明を参照。
起動順番
One起動時、BIOSが三つの場所に行き起動ディスクを探す:内蔵のFlashメモリ、Micro SDカード、USBポータブルディスク。探す順番はFlashメモリ、Micro SDカード、USBポータブルディスクの順となっている。既に86Duinoシステムがインストールされており、ZeroにSD カード或いは USBポータブルディスクが無い場合、Flashより起動する。
註:注意していただきたいのは、Micro SDカード或いはUSBポータブルディスクに、Micro SDカード或いはUSBポータブルディスクに86Duinoシステム或いは作業システム(例Windows 或いは Linux)をインストールするための空きが必要だということで、さもないと、起動に失敗してしまうだろう。
Micro SD カード插入方向
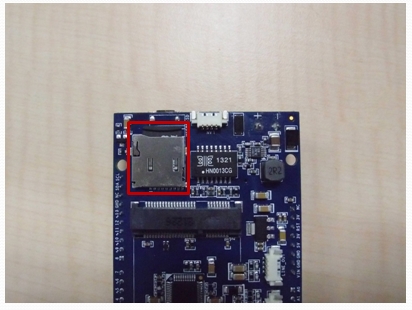
Micro SD スロットは Oneの 背面にあり,下図のように Micro SD カードを差し込む:

One の MicroSDスロットの位置はArduino SDカード拡張ボード及び一般の組込みシステム開発ボードのスロットよりも更にボードの深いところに、わざと設計されており、それはMicroSDカード挿入後に完全に飛び出ないようにするためである(下図参照)。
Oneは下げ強い動作に用いる装置であるため、このような設計をし、衝撃によりMicroSDカード脱落の惨劇を防ぐようになっている。
三、GPIO ピン(デジタル出力/入力ピン)
86Duino One 45 本の GPIO ピンを,下図のように提供する。86Duino Coding開発環境內において,あなたは digitalWrite関数を呼び出し、このピンの上で HIGH 或 いはLOWの操作をすることをしたり,或いはdigitalRead関数を呼び出して入力状態にすることができる。
全てのGPIOピンはみな出力と入力の方向を持ち、あなたはpinMode関数を呼び出して方向を設定することができる。GPIOの出力方向を設定する時、出力はHIGH が 3.3V,LOW が0Vであり,毎本ごとの電流出力は最高で16mAである。GPIOの入力方向を設定する時は、その電圧は0 ~ 5Vである。
86Duino OneとArduinoは類似しており、GPIOピンの部分には別の機能が有り、例えば:ピンコード~ナンバーや、出力PWMシグナルなどである;RX 或いは TXの文字を持つ場合、代表的なものはUARTシリアルシグナルで;EA、EB 、EZの文字を持つ者は代表的なものは入力Encoderシグナルである。私たちは一組のピンを選び、異なる機能のナンバー表示について、下図のように説明したい:

GPIO に関する説明は更に多いので, 基礎ハードウェア概念を参考していただきたい。
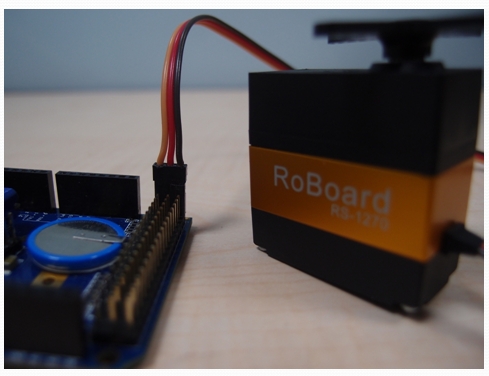
RC サーボピン
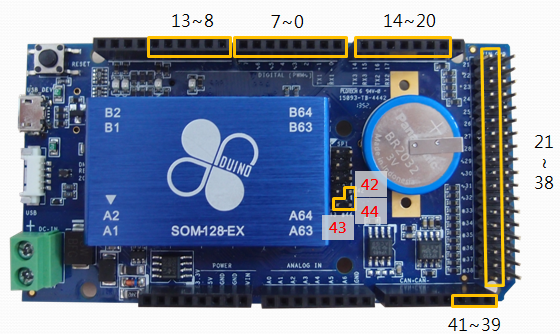
86Duino Oneの右側にある21から38までのGPIOピンはRCサーボ・コネクタとして設計されており、追加のアダプタ・プレートを必要とせずにRCサーボを直接接続することができます。 86Duinoコーディング開発環境でServoライブラリを使用して、これらのサーボ動作を制御することができます。
RCサーボのピンアサイン:
RCサーボの多種多様性と品質のため、このコネクタの各GPIOピンには、基本的な保護のために200オームの電流制限保護抵抗(下の回路に示すように)を追加しました。 我々はまた、18台のサーボが同時に動作しているときに消費される大電流を流すことができるように、Oneボードを特別に設計しました。
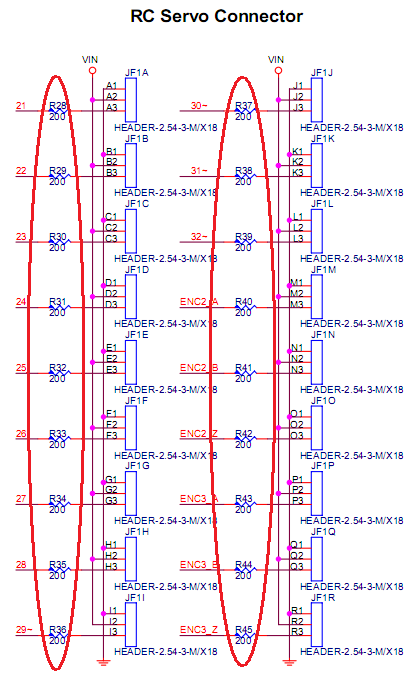
また、RCサーボコネクタのVINはGPIOに近いため、動作には注意が必要ですので、VINとGPIOをショートさせないでください。 GPIOが焼損するのを避けるため。
RC サーボ接続例
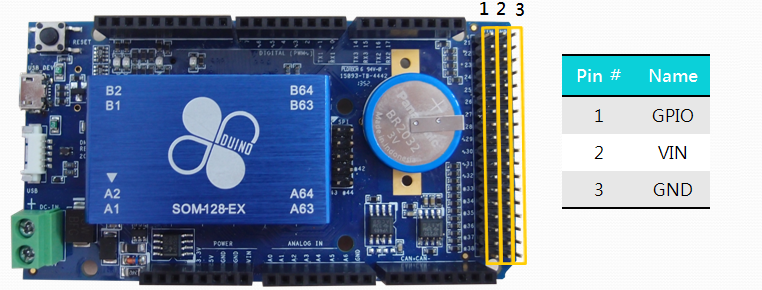
RCサーボ・コネクタ・ピンの配置は、市場で一般的に使用されている信号、電源、およびアース線の標準的な配置に準拠しています。
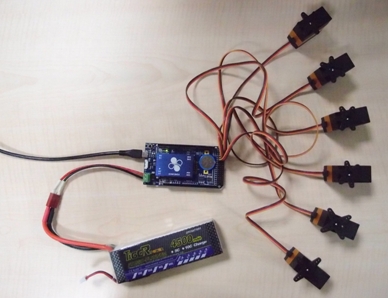
一部の安価なRCサーボは設計が不適切で、起動時にVIN電源に大きく干渉し、VIN電源を6V以下にすると、CPUモジュールが不足電圧保護を開始してシャットダウンします。 この場合、解決策の1つは、サーボの干渉を克服するために大電流を瞬時に供給できる外部電源(たとえば、専用のサーバーバッテリ)を交換する方法と、マイクロUSBコネクタから安定した5Vを供給することです。 OneのCPUモジュールへの電源供給。これは、次の図に示すように、市販のサーボ制御ボードの一般的な2電源方式です。
四、LED ランプ
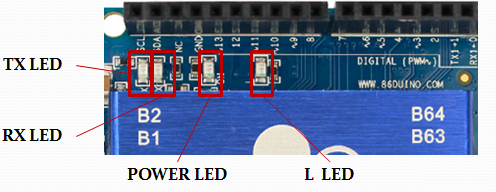
LEDは開発の中で最も常用される状態指示設備であり、86Duino Oneボード上には四個の指示ランプがある:(1)電源指示ランプ(POWER LED),ボード上の表記はONで、電源に差し込んだ時に点灯する(緑色ランプ);(2) TX LEDランプ, OneがUSB Deviceポートを通じてPCにデータを送る時、点滅する;(3) RX LEDランプ,OneがUSB DeviceポートがPCにデータを送る時,点滅する;(3) RX LED;(4)ボード上の表記はL の LEDランプで,Pin 13(表記は13の GPIOピン)を通じてその点灯消灯をコントロールする。
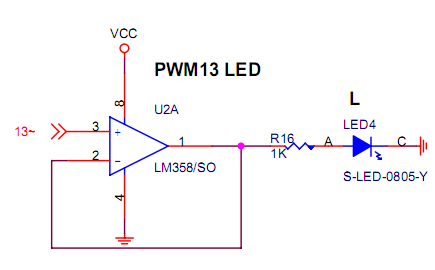
Pin 13 と L指示ランプの接続電子回路図は下図に示した通りである。Pin 13出力がHIGHの時、L 指示ランプは点灯する(オレンジ色);出力LOWの時、L 指示ランプは消える
五、RESET
86Duino Oneはボード上の左隅にRESETボタンが有り、左下にRESETピンが、下図に示した通りに有る。
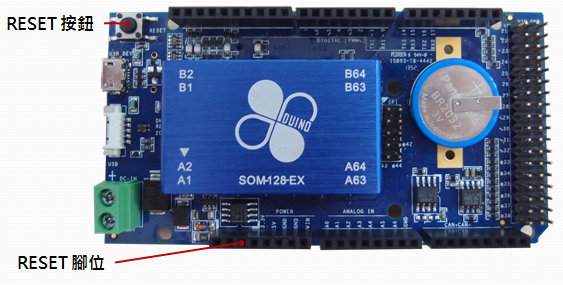
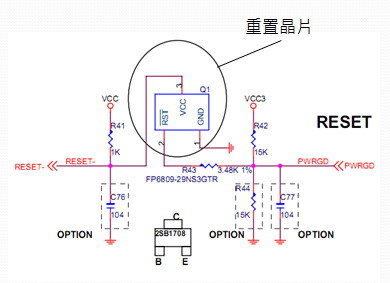
RESETピンは、内部にCPUモジュール上のチップに接続されており、RESETピンで低電脈クロックを出しOneを再起動させる。RESETピンの電気回路図は下図の通り:
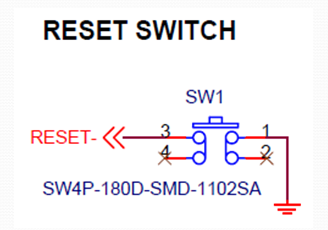
RESETボタンはRESETピンに接続され、RESETボタンを押すと同様にOneを再起動させることができる。
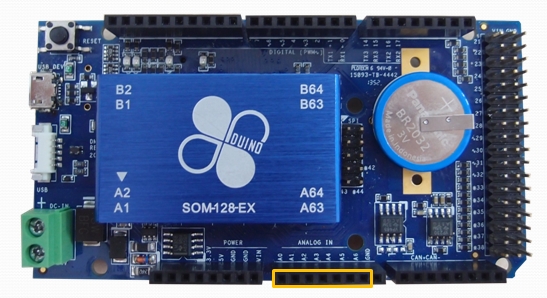
六、A/D ピン(アナログ入力ピン)
86Duino Oneは7個のアナログピンAD0 ~ AD6を、下図のように提供する:
各チャネルは最高11 bitsの解析度を持ち、あなたは86Duino Coding開発環境においてanalogRead関数を呼び出し任意のチャネルの電圧値を読み取ることができる。Arduinoと同期するため、analogRead関数の読み取りのA/D 值解析度は10 bitsとあらかじめ設定してあり、あなたはanalogReadResolution関数を通じ解析度を最高11 bitsに調整可能である。
注意していただきたいのは、各A/Dチャネルは入力可能な電圧の範囲が0V ~ 3.3Vであり、使用上厳格に入力電圧が3.3V以下に制限されており、任意のA/Dチャネルにそれを超える入力をさせた場合、読み取る数値に異常が発生し、最悪の場合、ピンが焼けてしまう。其の外、Oneの A/DピンはArduino Leonardoのような一切の切り替えシグナル出力ピンが無い。
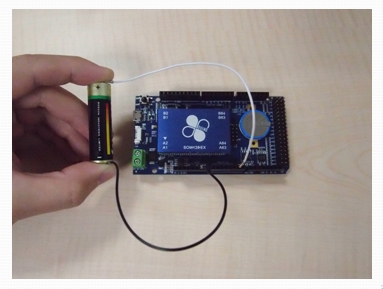
配線例
この例の中で、私たちはOneを用いAA電池電圧を測定する。電池のプラスが
AD0 ~ AD6の中の一つと繋げると、電池のマイナスはGNDとつながり、analogRead関数を呼び出し電池電圧を読み取ることができる。配線は下図に示した通り:
A/Dの更なる説明については、基礎ハードウェア概念を参考にされたい。
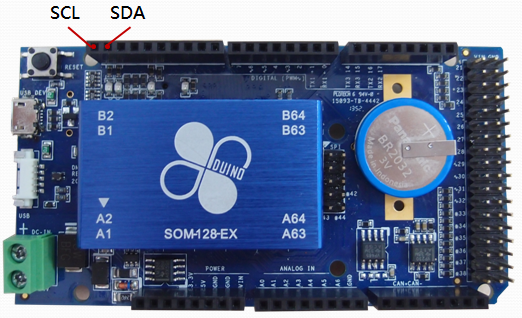
七、I2C ポート
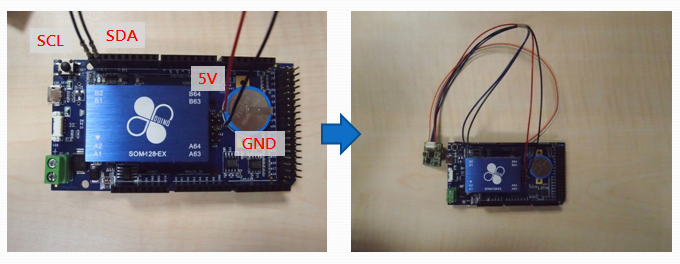
86Duino Oneは一組 I2C, SDA と SCLを提供する。配置は下図の通り:
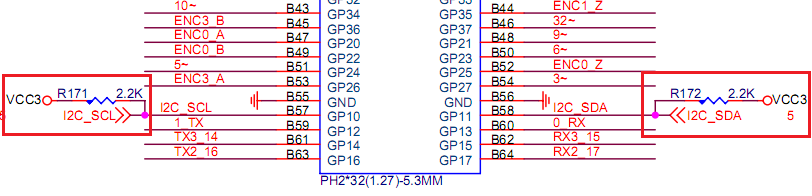
86Duino Coding開発環境においてWire関数を使用しI2Cポートを操作することが可能である。OneはI2C規範のstandard mode(最高 100Kbps)、fast mode(最高 400Kbps)、high-speed mode(最高 3.3Mbps)の三種類の速度モジュールと外部設備通信をサポートする。I2C規範をもとに、外部設備と接続する場合、SCL と SDAピンの電圧をあげる必要ある(ウィキペディアの説明参照)。電圧値の上昇とI2C速度モジュールは関係しており、Oneにおいては, 100Kbpsと 400Kbps の速度モジュールの下で、抵抗を加えてなくでもよい;3.3Mbps 速度モジュールでは、1.8~2KΩの抵抗に引き上げることをお勧めする。
配線例
私たちはRoBoard Module RoBoard Module RM-G146 9 軸慣性感測器を例として,いかにして One の I2C ポートを接続するかの例を示す。下図に RM-G146 のピン配置を示す:
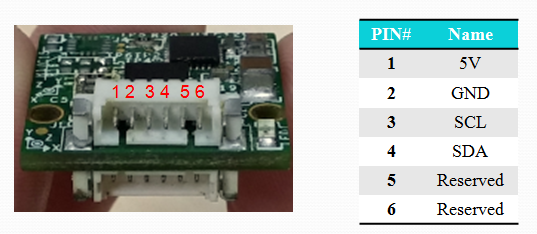
私たちはOneの5V出力ピンをRM-G146の5V出職に繋ぎ、GNDを相互にドッキングさせ、I2Cチャネルも相互にドッキングさせ、正確にOne と RM-G146 をI2Cを通じ互いに通信させることができる。接続は下図に示した通り:
八、PWM ポート
86Duino Oneは11個のPWM出力チャネルを提供し(GPIO との共用ピン)、それぞれ下図に示した通り3、5、6、9、10、11、13、29、30、31、32,に分けられる。
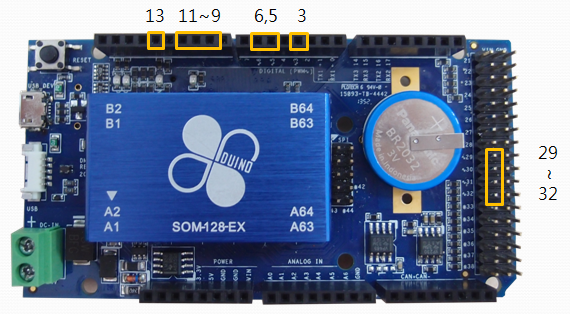
86Duino Coding開発環境においてanalogWrite関数を呼び出し、これらのピンにPWM信号を発せさせることができる。OneのPWMチャネルは最高25MHz 或いは 32-bit の解析度の出力シグナルを出すことができるが、Arduinoと同期するため、あらかじめその周波数は1KHz、解析度は8 bitsと設定されている。
analogWrite関数出力のPWM周波数は1KHzに固定され調整することはできないが、あなたはanalogWriteResolution関数を呼び出してその出力のPWMシグナル解析度を13 bitsにまで引き上げることができる。もしあなたがPWMピン上でその他の周波数を出力したい場合は、TimerOne関数を用いてPWMシグナルを出力し、最高出力周波数を1MHzとすることができる。
PWMに関するより多くの説明は、基礎ハードウェア概念を参考にされたい。
九、TTL シリアルポート(UART TTL)
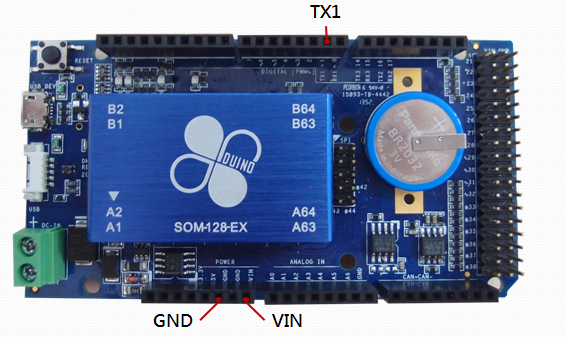
86Duino OneはTX (1) / RX (0)、TX2 (16) / RX2 (17)、TX3 (14) / RX3 (15)の3組の UART TTLを提供し,その通信速度(ボーレート)は最高 6Mbpsに達する。Serial1 ~ Serial3関数を使用しそのデータを送受信することができる。
UART TTLポートの位置は下図に示した通り:

注意してほしいのは、このUARTシグナルはLVTTL電圧準位(0 ~ 3.3V)に属するので、
12Vの電圧準位のRS232ポートシグナルを直接このUART TTLポートに繋がないこと。焼けが起こってしまう。
話すに値するのは、Oneの UART TTLには二種類のモジュールが備わっていることだ。このモジュールが作動する時、ロボット専用のAIサーバを呼び出し接続することを要求できることで、Arduino やRaspberry Piとは違い、イーサネット回路を切り替えることが可能だ。
接続例
本例ではいかにしてOneと Robotis会社が提供するDymanixel AX-12+ロボットサーバと接続するのかを示す。下図はAX-12+及びそのピン位置である。

AX-12+はUART TTLシグナルを採用しているので、Oneの UARTはモジュールと相関関係にある。このモジュールにおいて、UARTの TXピンはシリアルデータの送受信を行い、RXは保留することができず、その為、ここで私たちは直接AX-12+のDATAピンをOne の Pin 1 (TX1)とドッキングし、VIN,GNDも、下図に示した通りドッキングする:
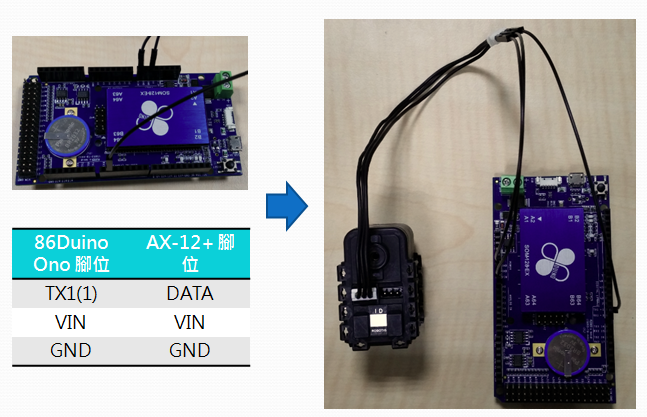
接続完了後、86Duino sketchプログラムにおいてSerial1とAX-12+通信を使用することが可能となる。注意すべきは、Oneと AX-12+のボレートは同じに設定すべきで、そうすることで初めて正常に作動する;其の外、VINはサーバに正確な作業電圧を提供し(7V ~ 10V)、AX-12+は初めて起動する。
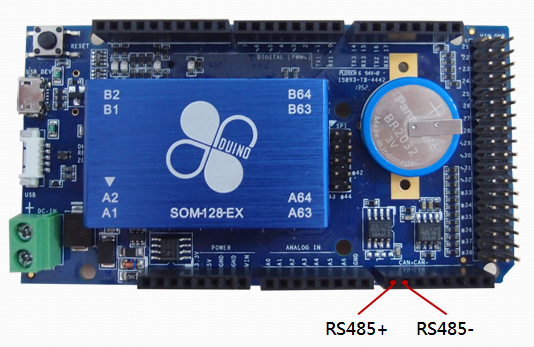
十、RS485 シリアル
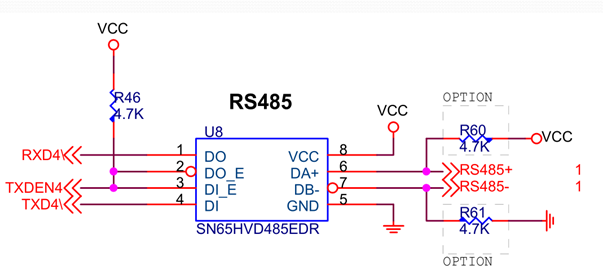
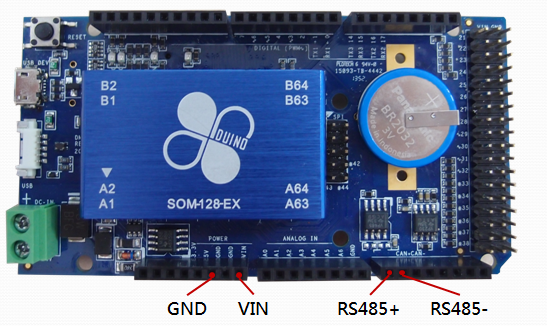
86Duino Oneは、Serial485インターフェイスを備えています。外部デバイスとの通信速度(ボーレート)は最大6Mbpsです。RS485ライブラリを使用して、データの送受信を行うことができます。 ピンの位置は次のとおりです。
RS485とUART TTLが異なり、差動信号が出力されるため、UART TTLと相互接続して通信することは不可能です。
接続例
RS485インターフェイスは、RS485通信が必要なロボットAIサーボを接続するために使用できます。ここでは、RobotisのDymanixel RX-28サーボをデモンストレーションとして使用します。 次の図は、RX-28の外観とそのピンマークを示しています。

Serial485を使用して86Duinoスケッチプログラムで相互に通信するには、RS485ピン、VIN、GNDおよびRX-28を直接接続します。
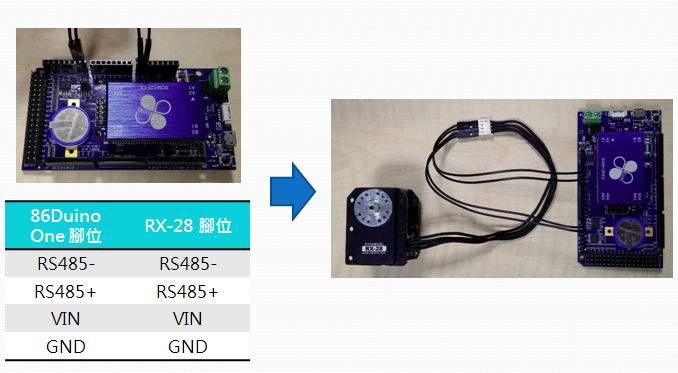
OneとRX-28のボーレートは同じに設定し、通信は正常であることに注意してください。また、VINはサーボの正しい動作電圧(12V〜16V)を提供しなければなりません。
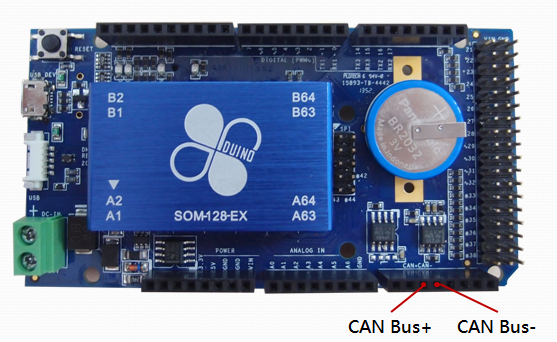
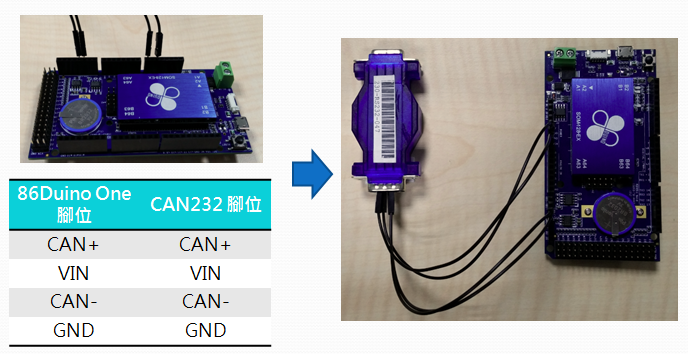
十一、CAN Bus ポート
CAN Busは、高度なセキュリティレベルと効率的なリアルタイム制御をサポートする産業通信プロトコルであり、さまざまな車両やオートメーション機器でよく使用されます。詳細は、Wikipediaを参照してください。 86Duino Oneボードには、CANバスインターフェイスのセットが用意されています。場所は次のとおりです。
CANBusライブラリを使用して、86Duinoコーディング開発環境でCANバスインターフェイスを操作することができます。OneとArduino Due間のCANバス・インタフェースは同じではなく、TI SN65HVD230のCANトランシーバはCANバス物理層信号を生成するためにOneボードに内蔵されており、外部CANバス・デバイスに直接接続できます。 Connected; Arduino DueにはCANトランシーバが内蔵されておらず、CANバスデバイスに接続するためにCANトランシーバをCANバスピンに追加する必要があります。
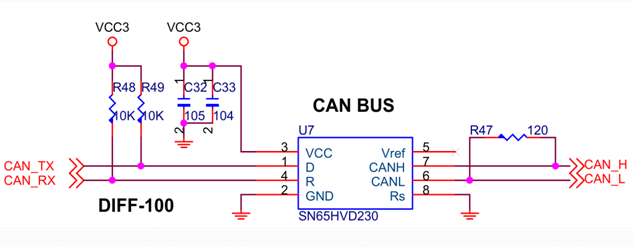
Arduino DueにはCANトランシーバがないため、CANバスインターフェイスはArduino DueのCANバスインターフェイスと直接インターフェイスできません。この接続は通信できません。
接続例
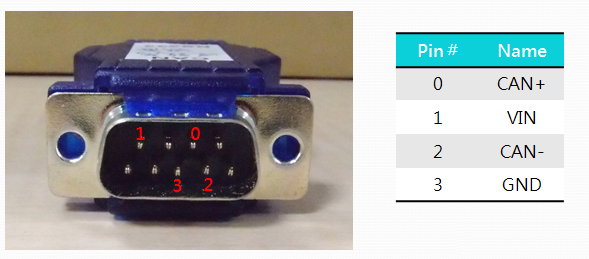
この例では、LAWICELAB製のCAN232デバイスをデモンストレーションとして使用しています。 次の図は、CAN232とそのピンの外観を示しています。
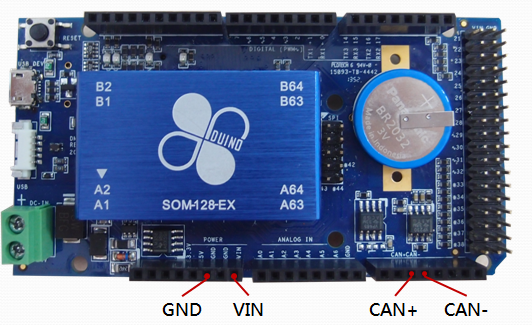
CAN232は6V〜15Vの電源を必要とし、OneのVINピンによって給電することができます。 したがって、次の図に示すように、OneのCANバスピン(VIN、GND、およびCAN232)を直接接続し、両者は相互に通信できます。
十二、SPI ポート
86Duino Oneは一組のSPIポートを提供し、位置はArduino LeonardoとArduino Due同じで、SPI通信協定のCSピンシグナルを下図に示した通り増加できる。

86Duino Coding開発環境においてSPI関数を使用しSPIポートを操作可能です。
十三、LAN インターネットポート
86Duino Oneは背面にLANポートを一つ提供し、10/100Mbps伝送速度を支援し、Ethernet関数を使用してデータの送受信を行うことができる。LANポートの位置とピンの定義は下記に示した通り:
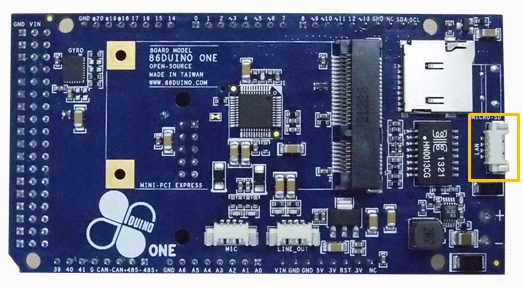
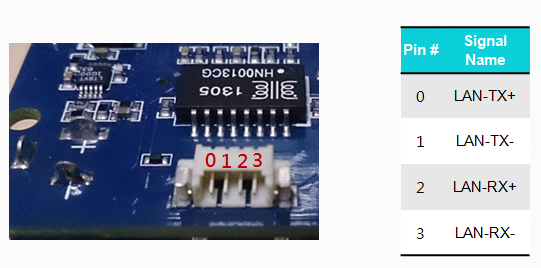
LANポートは1.25mmの4Pコネクタであり、その為、RJ45コネクタ1本を伝送ケーブルとして制作し(86Duino One配線パック内にこれを含む)、ネットに繋ぐ必要が有る。RJ45をボード上に半田しないと、容易に抜け落ちてしまい、ボードの安全上に問題が出てくる。
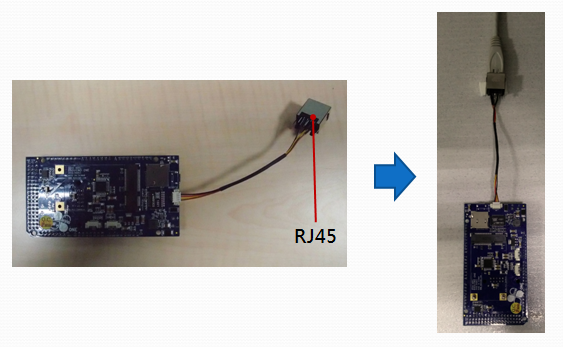
接線例
下図は86Duino One配線パック内の伝送ケーブルを用いた、接続例である:
十四、Audio ジャック
86Duino OneにはHD Audioオーディオカードが内蔵されており、高品位オーディオチップRealtek ALC262を介して、2チャンネルのオーディオ出力と1組のマイク入力を提供します。 86Duinoコーディング開発環境では、オーディオライブラリを使用してステレオサウンドを出力できます。
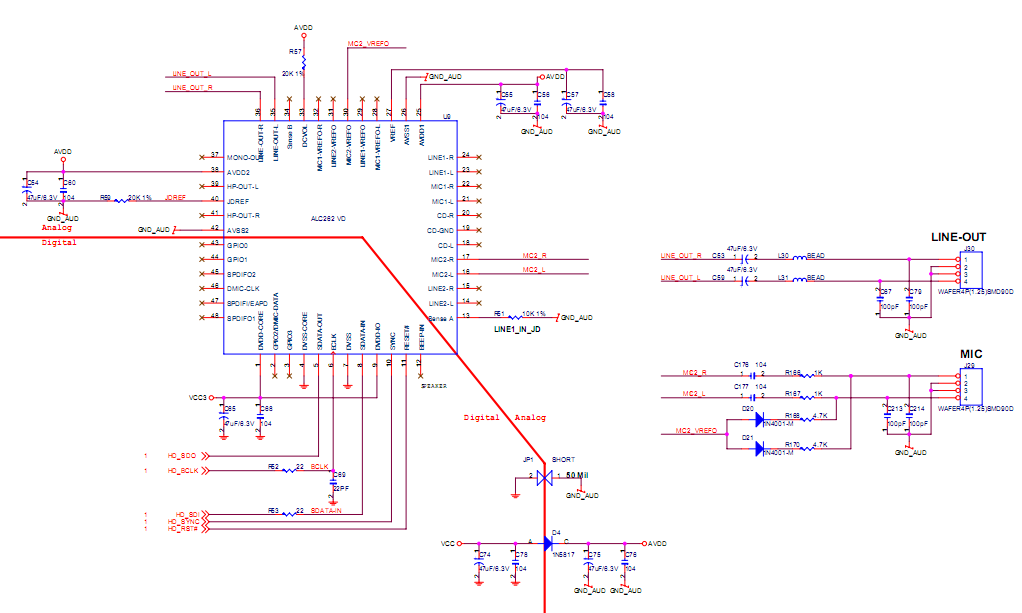
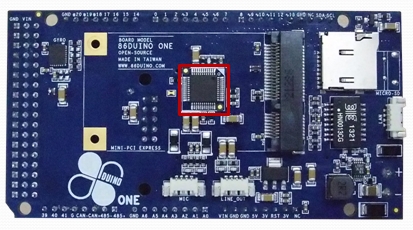
Realtek ALC262 チップは One 背面にある,写真の通り:
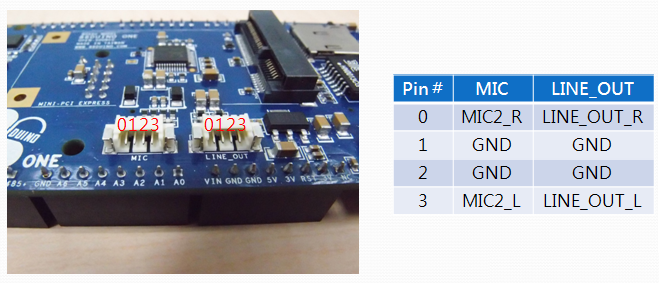
オーディオ出力とマイク入力ジャックはオーディオチップの下にあり、下図のように2個の1.25mm 4Pコネクタがあります。左側はMIC(マイク入力)、右側はLINE_OUT(オーディオ出力)です。
TRS端子のヘッドホン/スピーカーとマイクを接続する場合は、TRSメスアダプタケーブル(86Duino Oneに2本の3.5mm TRSアダプタケーブルが2本あります)を接続する必要があります。 TRSソケットを基板に半田付けするのではなく、ロボットの設計者がTRSソケットをロボットに配置することもできます。この場合、コントロールパネルの取り付け位置を調整することなくスピーカーとマイクを簡単に挿抜できます。
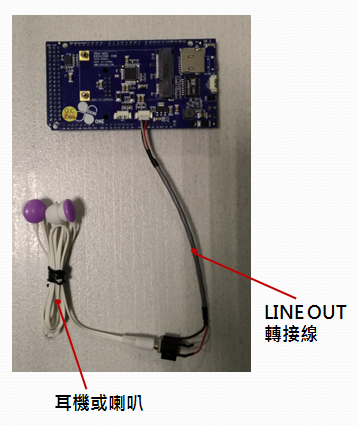
接続例
次の図は、86Duino Oneディストリビューションパッケージに含まれている転送ケーブルを使用して、オーディオ出力とヘッドセットの接続を示しています。
十五、USB 2.0 ポート
86Duino OneにはUSB 2.0 Hostポートが一つあり、外部のUSB 裝置(例えばUSBキーボード及びマウス)と接続が可能である。86Duino Coding開発環境において、USB Host 関数を使用してUSBキーボード、マウスを取得することができる。貴方がOneにWindows 或いは Linux作業システムをインストールする時、USBポートはUSB無線ラン及びUSBカメラに接続して、その機能を拡張することができる。USBポートの位置及びピンの定義は下図に示した通り:

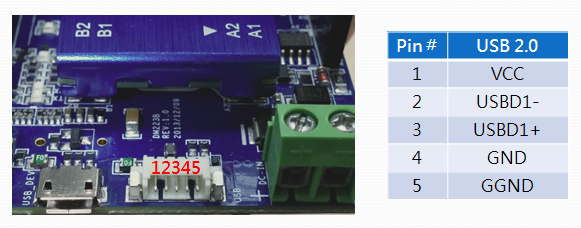
USBポートは1.25mmの5Pコネクタであり、その為、USBコネクタの伝送線(86Duino One配線パック内に1本のUSB Type A伝送線を含む)を作成しUSB装置に連接する。
安全の為、USB伝送線はボードにしっかりはんだすること。
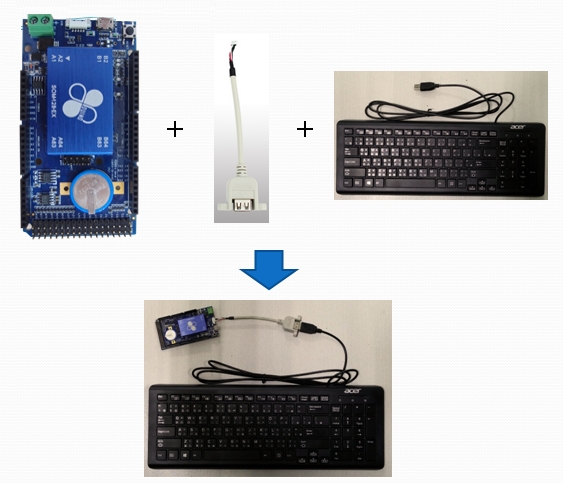
接続例
下図は86Duino One配線パック内に付属する伝送線を用いて、USBマウスに接続した例である:
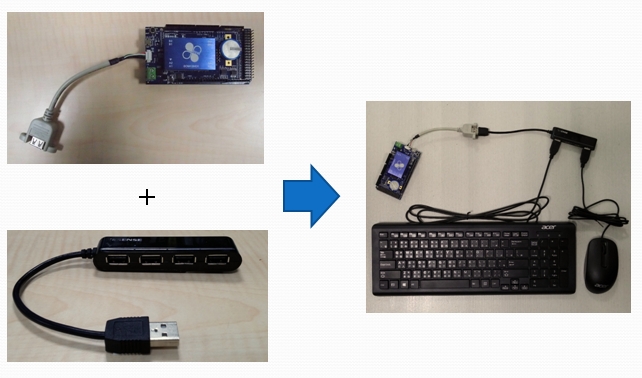
もし二つ以上のUSB装置を接続する場合は、USB Hubを使用しより多くのUSBスロットを拡張し、下図の例のようにUSB Hubを用いてUSBキーボードとマウスを同時に接続すること:
十六、Encoder ポート
86Duino Oneは1 組の Encoderポートを提供し、ピンは3つ有り、それぞれ下図に示した通りA、B、Zとなる:
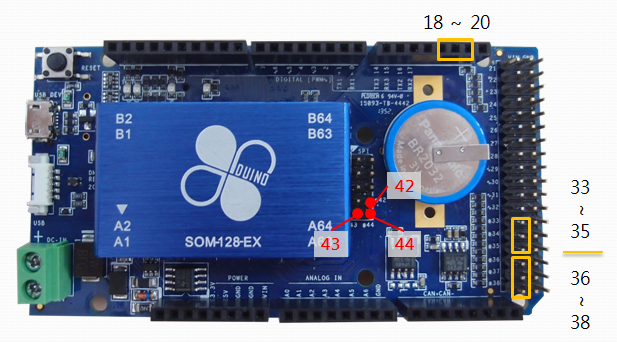
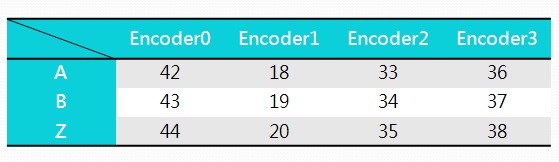
Encoderポートは光学増量コードを及びSSI絶対コードシグナルを読み取り、86Duino Coding開発環境において、Encoder関数を使用してその数値を読み取ることができる。Encoderポートの最高入力シグナル周波数は25MHz。
配線例
私たちはICを例として、それと86Duino Oneの Encoderポートの接続例を示す。下図にAM4096のピン配置を示す:
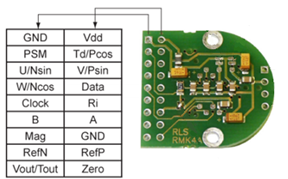
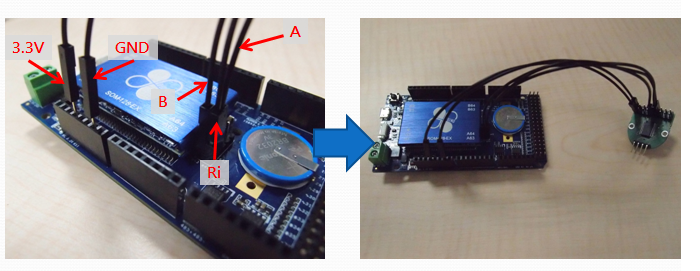
上図の出力ピン中の、増量エンコーダーシリアル出力の一組は、即ちA/B Phaseであり、ピンの標示はそれぞれA、B 、Riとなっている。私たちはAM4096 の A、B 、Riを個別に42、43、44に繋ぎ、その後AM4096の電源Vddを3.3Vに繋ぎ、AM4096のGNDをZeroのGNDに繋ぎ、このようにしてようやく正確にOneと AM4096をEncoderを通じ相互に通信させることができる。接続図は下図に示した通り:
十七、3軸加速度計と3軸ジャイロスコープ
3軸加速度計と3軸ジャイロセンサーチップLSM330DLCは、86Duino Oneボードに内蔵されており、ロボットの姿勢を感知するのに使用できます。 FreeIMU1ライブラリを使用して86Duinoコーディング開発環境で読むことができます。
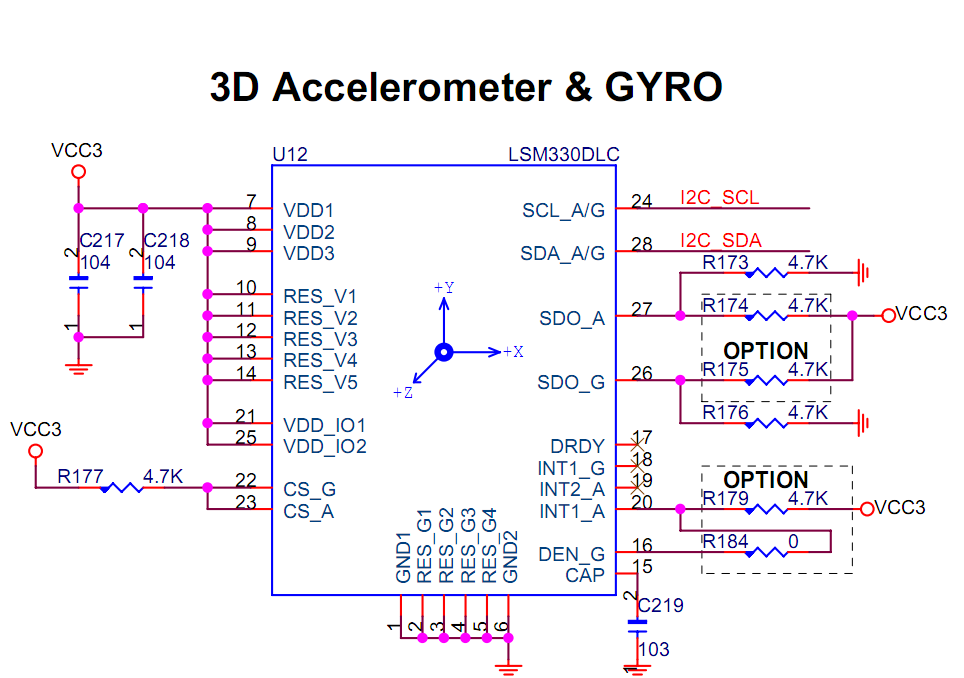
センターチップ位置は写真の通り:
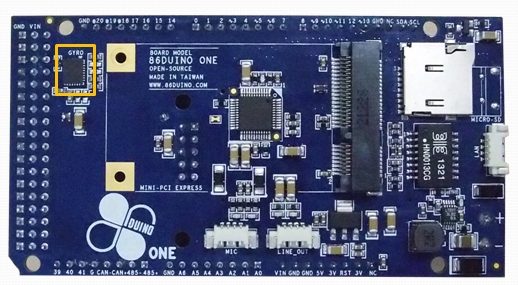
下の写真は、Oneボード上の検出されたX-Y-Z座標の対応を示しています。
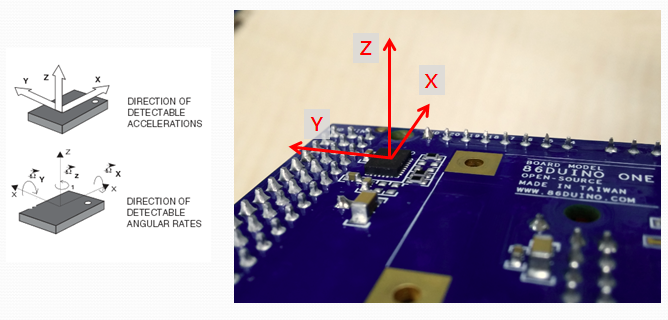
このセンサチップは、I2Cアドレス0x18と0x6Aの2つのI2Cアドレス(これは7ビットアドレスで、対応する8ビットアドレスは0x30と0xD4)を占有しているI2Cインタフェースに接続されています。 同じアドレスを持つI2Cデバイスでは、競合が発生する可能性があります。
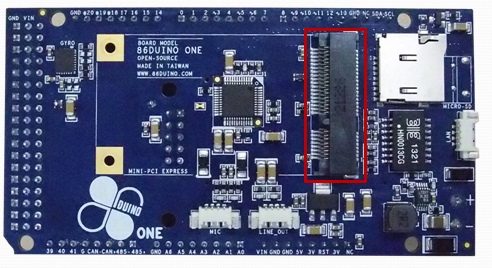
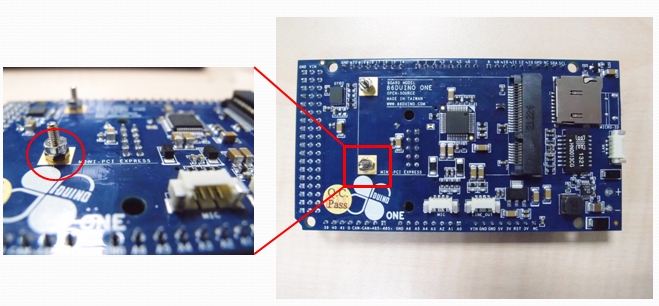
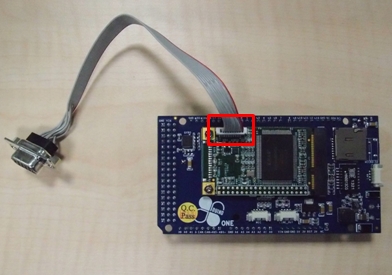
十八、Mini PCI-E
86Duino Oneの背面には、VGAグラフィックスカードやWiFi無線カードなどのミニPCI-E拡張カードを取り付けるためのミニPCI-Eスロット(下の赤枠)があります。
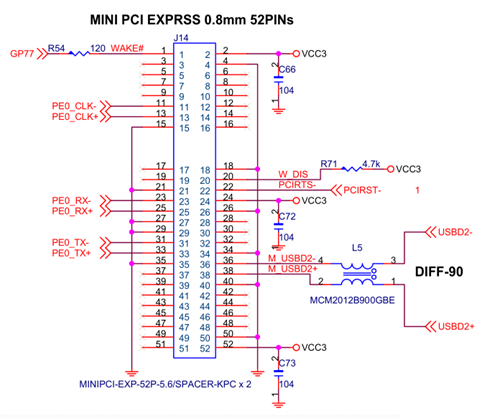
Mini PCI-E 回路図は下の写真の通り:
接続例
ここでは、Vortex86VGAグラフィックカード(以下に示す)をインストールして、モニター出力機能を持つようにする方法を示します。
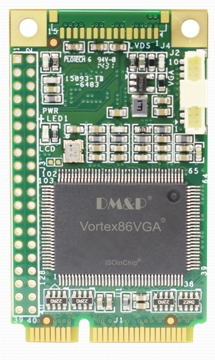
次の図は、Vortex86VGAグラフィックスカードに付属しているアクセサリを示しています。VGA出力ケーブル、2本のネジ、6本のナットがあり、ネジとナットはMini PCI-Eカードを固定するために使用します。

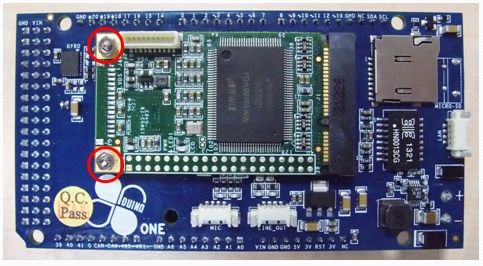
グラフィックカードは次のようにインストールされます。 以下の赤い丸で示されているように、最初にCMOSバッテリーの両側の固定穴にネジを通します。

Oneの背面に向かって回転させ、2本のネジのそれぞれに2つのナットをロックします。
次に、Vortex86VGAチップを上にしてビデオカードをMini PCI-Eスロットに斜めに挿入します。接触不良を避けるため、ビデオカードを最後に挿入してください。
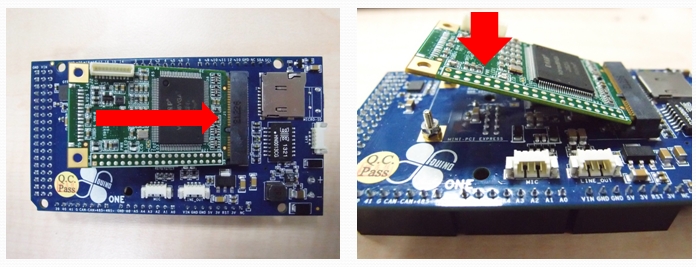
次にビデオカードを押し下げて、固定穴が以前に固定された2本のネジを通過し、次にナットがロックされます。
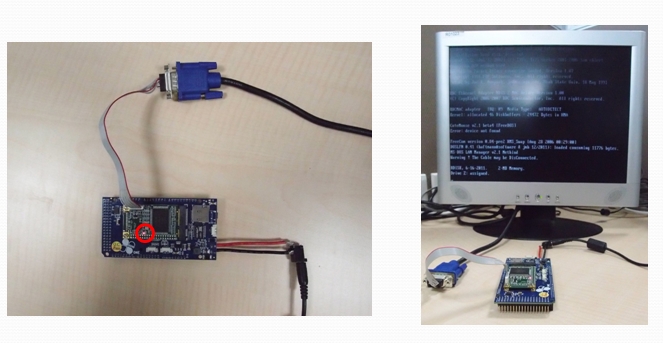
VGA出力ケーブルをグラフィックスカードに取り付けます。
最後に、VGAコネクタを画面に接続します。 Oneがオンになると、Vortex86VGAグラフィックスカードの赤色LEDの電源ライトが点灯し(左下の赤丸)、画面に開始メッセージが表示されます。
註:86Duino OneをVortex86VGAグラフィックスカードに接続すると、合計消費電力が500mAのUSB 2.0仕様を超える5Vの600mAに増加するため、通常のPCでUSB 2.0スロットを使用してOneおよびVortex86VGAに電力を供給することはできません。
十九、CMOS 電池
大部分のx86パソコンにはCMOS メモリが有りそれによりBIOS 設定及びクロック(RTC)が記録する時間日時を保存する。CMOSメモリにはシャットダウン後に消去された記憶を保存する特徴があるため、x86パソコンメインボードには通常外部接続の電池によりCMOSメモリ内容を維持するようになっている。
86Duino Oneはx86開発ボードとして、同様に上述のCMOSメモリ及び電池を備えており、それは下図に赤丸で示した通りである:

しかしながら、Oneの CMOSメモリはクロック時間及びEEPROM関数のCMOS bankデータしか記録できず、並びにBIOS 設定は保存できない:その為、CMOS電池故障やOneのBIOSが正常に作動しないことは招かないが、EEPROM関数が保存するCMOS bankデータを失う可能性が有り、並びにTime86関数に読み取らせたクロックが重複する可能性が有る。EEPROM 及 びTime86関数が正常に作動するために、平時はボード上のCMOSを取り除こうとしないこと。
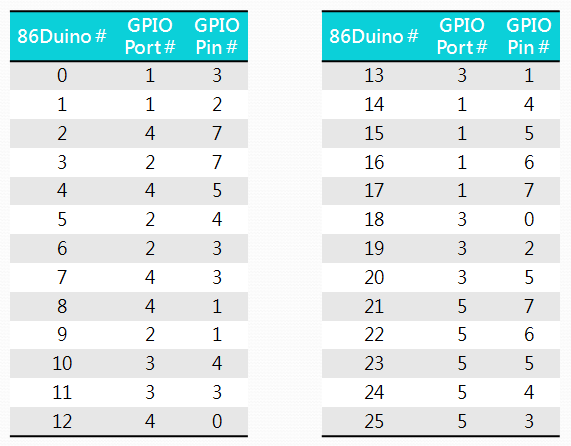
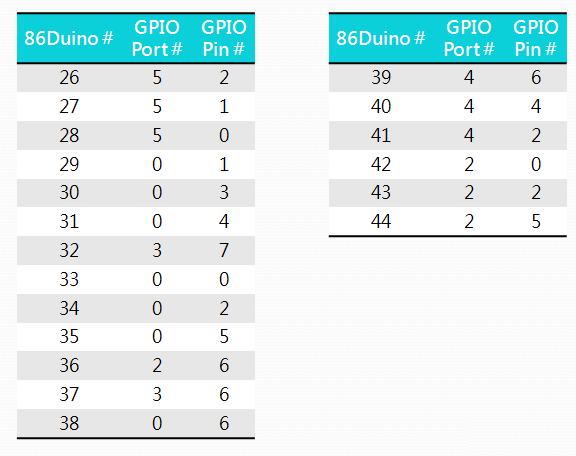
附錄一:86Duino Oneピン名称及び Vortex86EX GPIO Ports の対応関係
附錄二:86Duino One配線パック內容
86Duino One配線パック內には下図に示した線材を含む。左よりそれぞれ、 micro-USB 電源ケーブル(プログラミングバーニングケーブル)、USB Host コネクタケーブル、RJ45 イーサネットケーブルLINE OUTケーブル、MICケーブル。

附錄三:86Duino One ハードウェアソースコード
The text of the 86Duino reference is licensed under a Creative Commons Attribution-ShareAlike 3.0 License. Code samples in the reference are released into the public domain.