getPPU()
Description
Get the PPU value of the machine on the specified axis.
The PPU (Pulse per Unit) relationship is as follows:
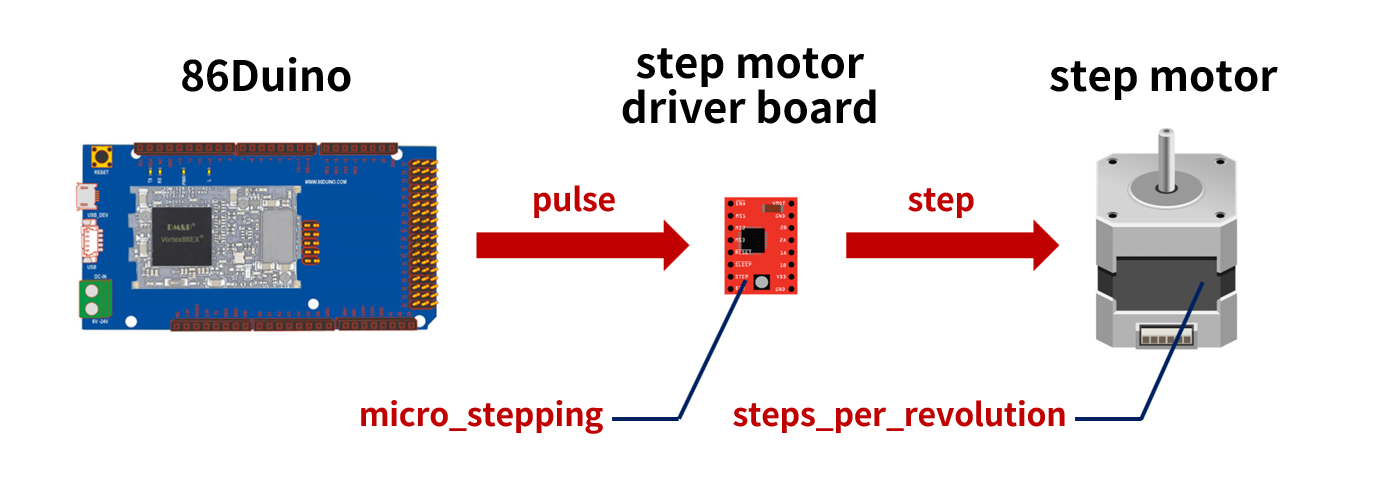
86Duino sends pulse to the stepper motor driver board, and the driver board will send step to make the stepper motor rotate.
micro_stepping: – Parameters on the stepper motor driver board. To generate one step, the number of pulses received from the 86Duino.
steps_per_revolution: – Parameters on the stepper motor. To generate one revolution, the number of steps received from the stepper motor driver board.
The calculation formula for pulses_per_revolution is steps_per_revolution * micro_stepping.
PPU: This is how many pulses the machine axis needs to output per unit distance. For example, 80 pulses/mm.
Syntax
machine.getPPU(axis);
Parameters
machine: Machine object.
axis: The axis for which the PPU is to be obtained, which can be AXIS_X, AXIS_Y or AXIS_Z.
Return
double: Returns the PPU value of the axis.
See also
getPulseMode()
computePPU_Belt()
computePPU_LeadScrew()
Library Reference
The text of the 86Duino reference material follows the Creative Commons Attribution-Share Alike 3.0 License. The code examples in the reference material have been released into the public domain.