computePPU_Belt()
Describe
When setting PPU (Pulse per Unit) using config_PPU, you can use the assist calculation function to obtain the setting parameters.
The PPU (Pulse per Unit) relationship is as follows:
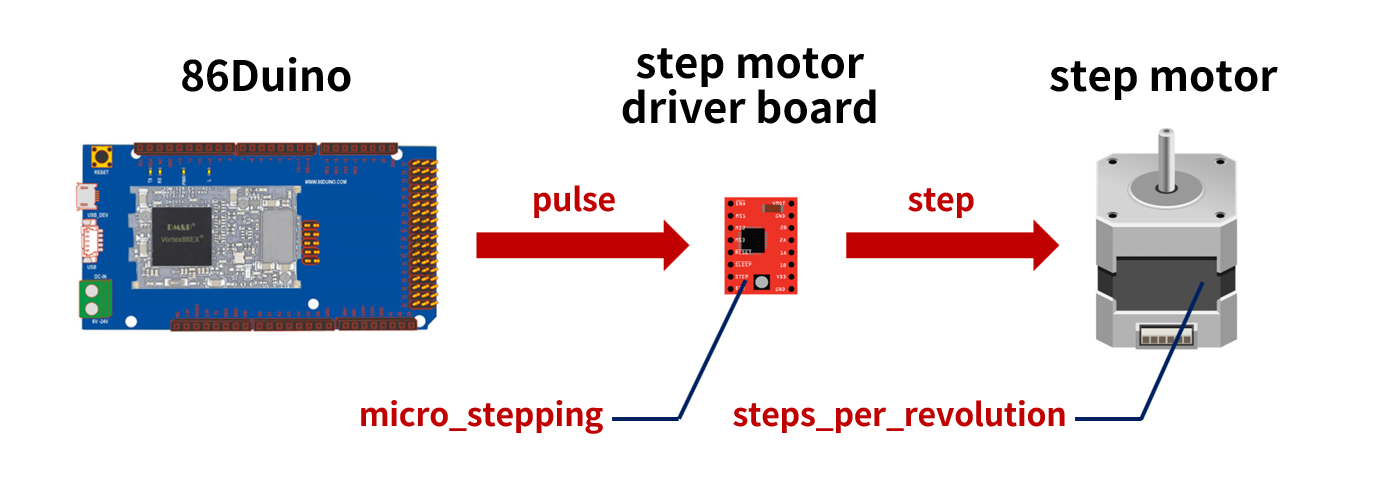
86Duino sends pulse to the stepper motor drive board, and the drive board will send a step to rotate the stepper motor.micro_stepping:
– Parameters on the stepper motor drive board. To type a step, the pulse number that needs to be received from 86Duino.steps_per_revolution:
– Parameters on the stepper motor, the number of steps received from the stepper motor driver board to rotate one circle.
The calculation formula for pulses_per_revolution is steps_per_revolution * micro_stepping.
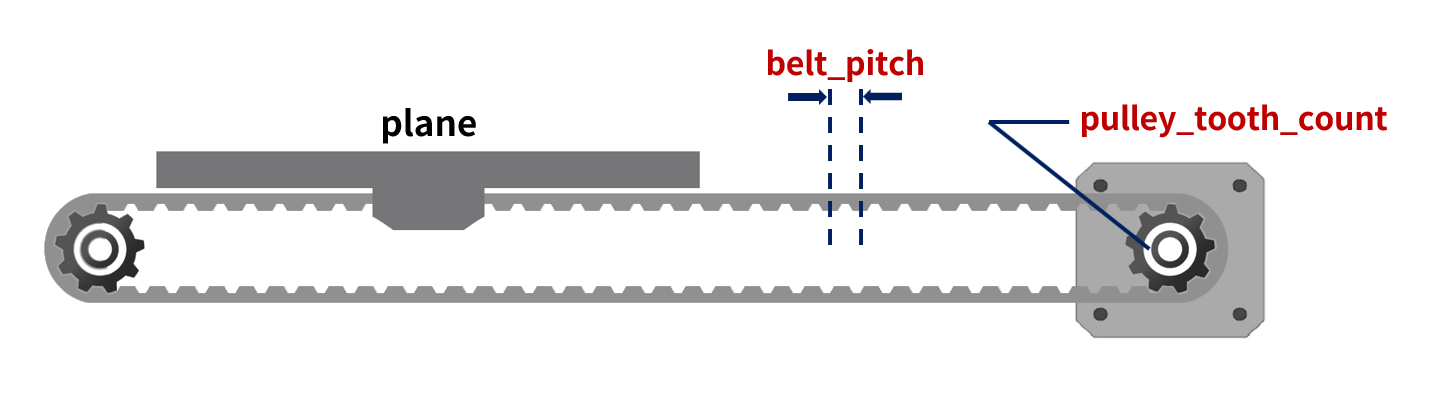
The parameters need to measure the belt tooth distance and the number of teeth of the gear, as shown in the figure below:
Grammar
machine.computePPU_Belt(pulses_per_revolution, belt_pitch, pulley_tooth_count);
Parameter
machine: It is an object of Machine.
pulses_per_revolution: Make the stepping motor and turn it around, and the pulse number that 86Duino needs to be played.
blet_pitch: Belt tooth distance, unit is millimeters.
pulley_tooth_count: Number of teeth of gear rotating synchronously with stepping motor.
Return
double: PPU (Pulse per Unit) after the backload calculation is completed. .
See also
config_PPU()
computePPU_LeadScrew()
Function library reference main page
The text of the 86Duino reference is licensed under a Creative Commons Attribution-ShareAlike 3.0 License. Code samples in the reference are released into the public domain.